Stewart parallel Lightweight-robot
Stewart parallel Lightweight-robot

Stewart parallel Lightweight-robot
Stewart parallel Lightweight-robot
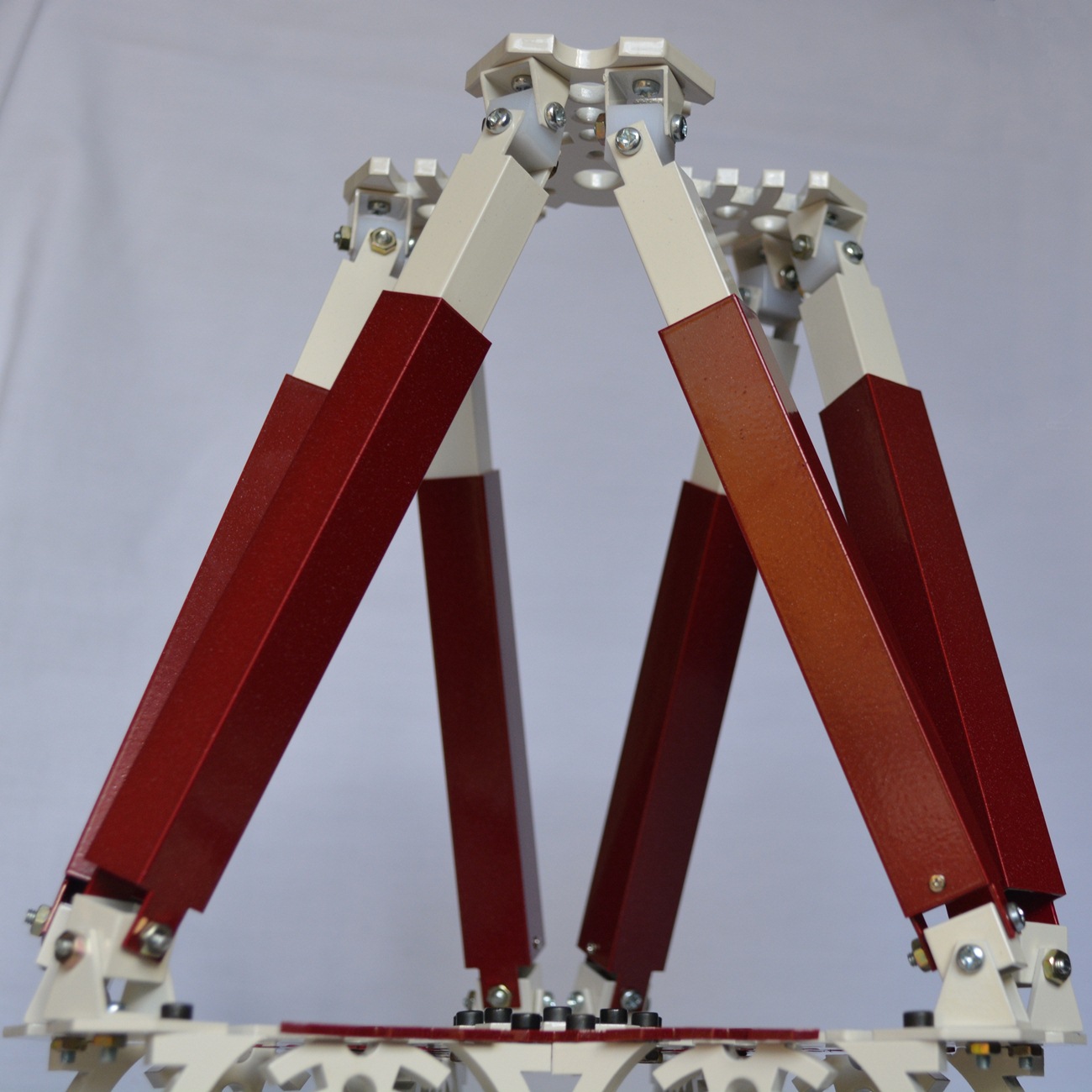
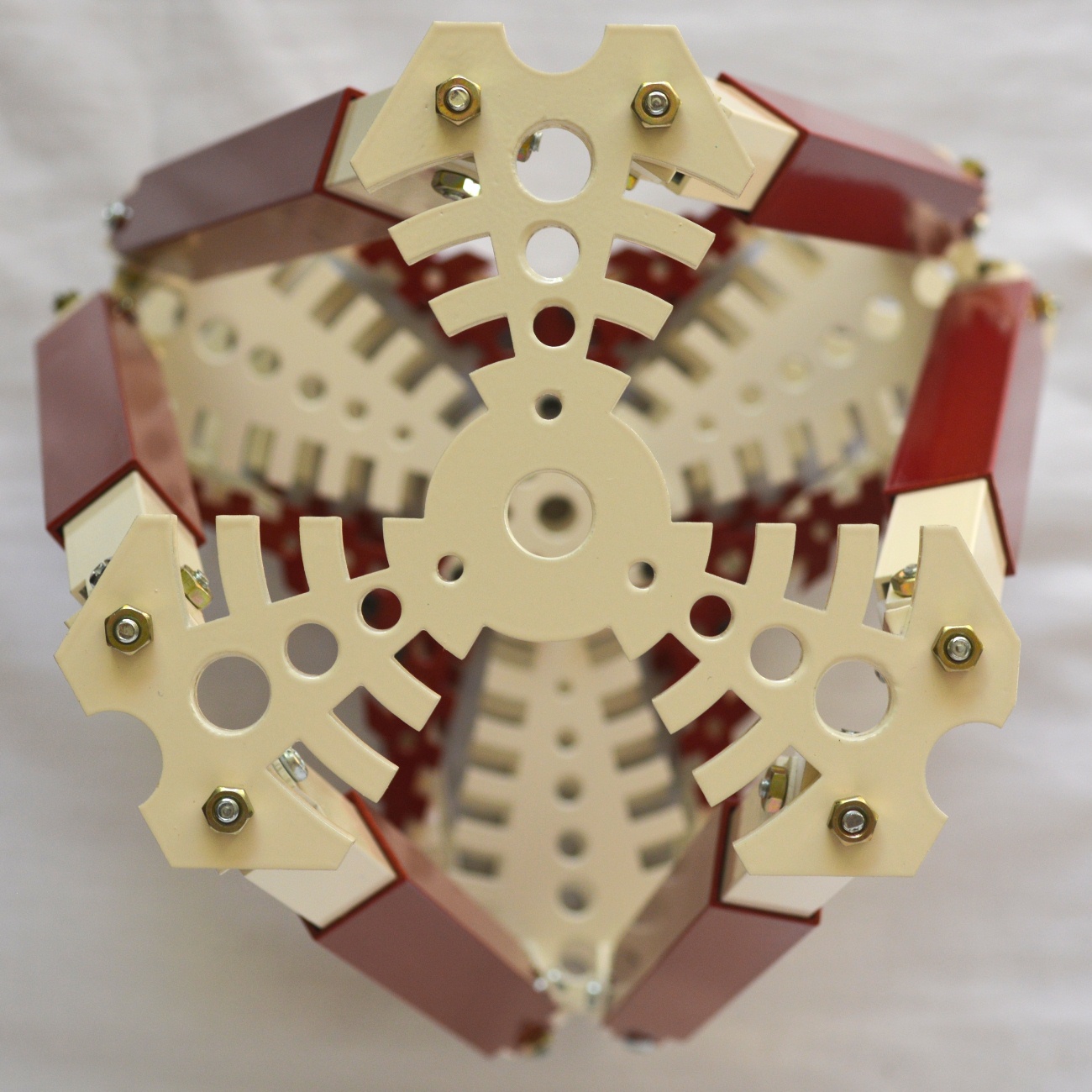
This Stewart Lightweight-robot is being design with aim of improve the knowledge of robotics teaching. It is a parallel architecture robot with 6 prismatic joints connecting a moving platform to the base.
The inverse kinematics of the robot determines the desired position each of the actuators that will allow performing different drawn paths. Therefore, the load capacity is generally large, and dynamic response is fast.
Colombia - 2018
Hernando Leon-Rodriguez