
Microrobots are being design roughly in the size range single to hundreds of mm, and being dominated by micro-scale physical forces and effects; contrasting milli-scale robots can be visible by human eye.
Primary uses in Medical applications.
Type of micro actuators
Different techniques can be uses to power micro-robots, the most successful is the principle of magnetic actuation is to propel micro-robots with magnetic forces and/or torques.
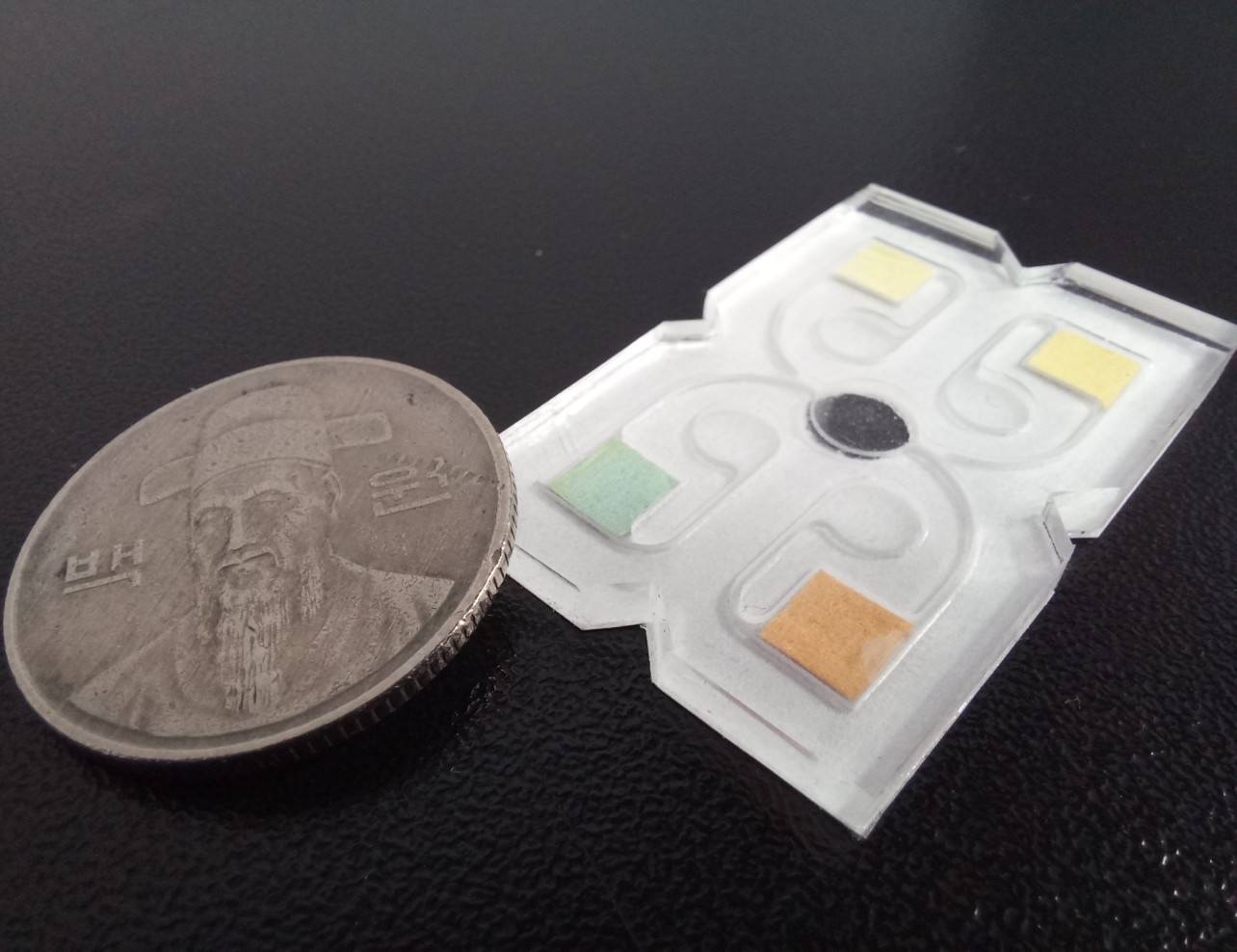
Werable Microfluidics Device
Werable Microfluidic device for sweat monitoring.
The micro-channels can collect and analize the fluid via biomarkets.
Korea, 2024

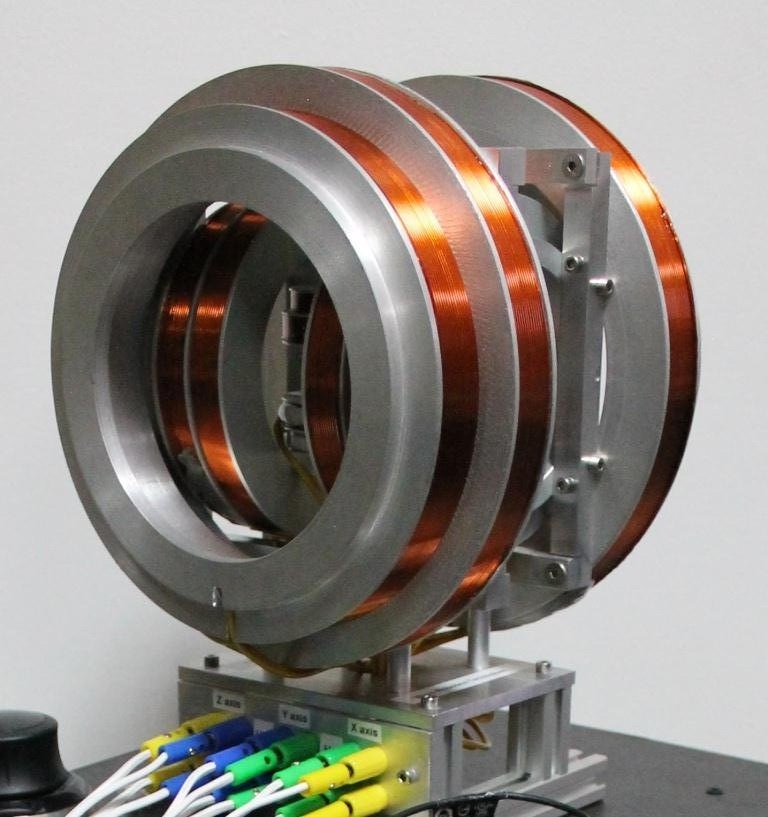
Electromagnetic actuator for micro-robots
Magnetic actuation is the based motion control for micro-robots.
The magnetic field excited a permanent magnet by six concentrator coils.
Colombia, 2020
Electromagnetic actuator for micro-robots
Magnetic actuation is the based motion control for micro-robots.
The magnetic field excited a permanent magnet by Helmholtz and Maxwell circuits.
Colombia - Korea, 2017
Caterpillar micro-robot
Needle walk micro-robot.
Powered by electromagnetic actuator.
Korea - 2015

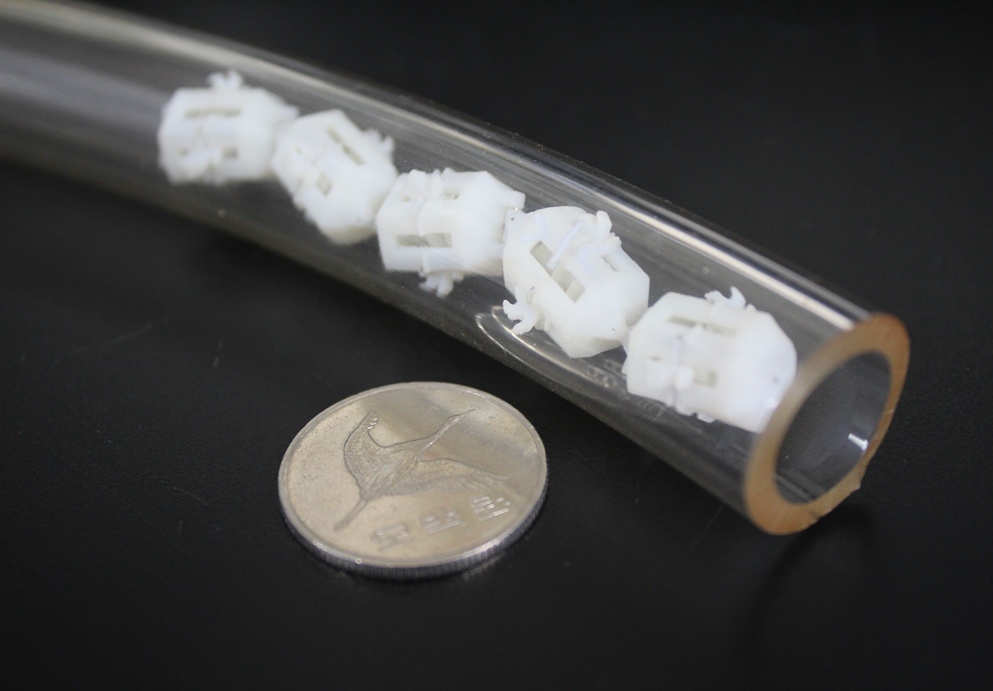
Centipede micro-robot
Walking micro-robot.
Powered by electromagnetic actuator.
Korea - 2015

Cockroach micro-robot
Wheeled micro-robot.
Powered by electromagnetic actuator.
Korea - 2015

Lumbricus micro-robot
Friction motion micro-robot.
Powered by electromagnetic actuator.
Korea - 2015
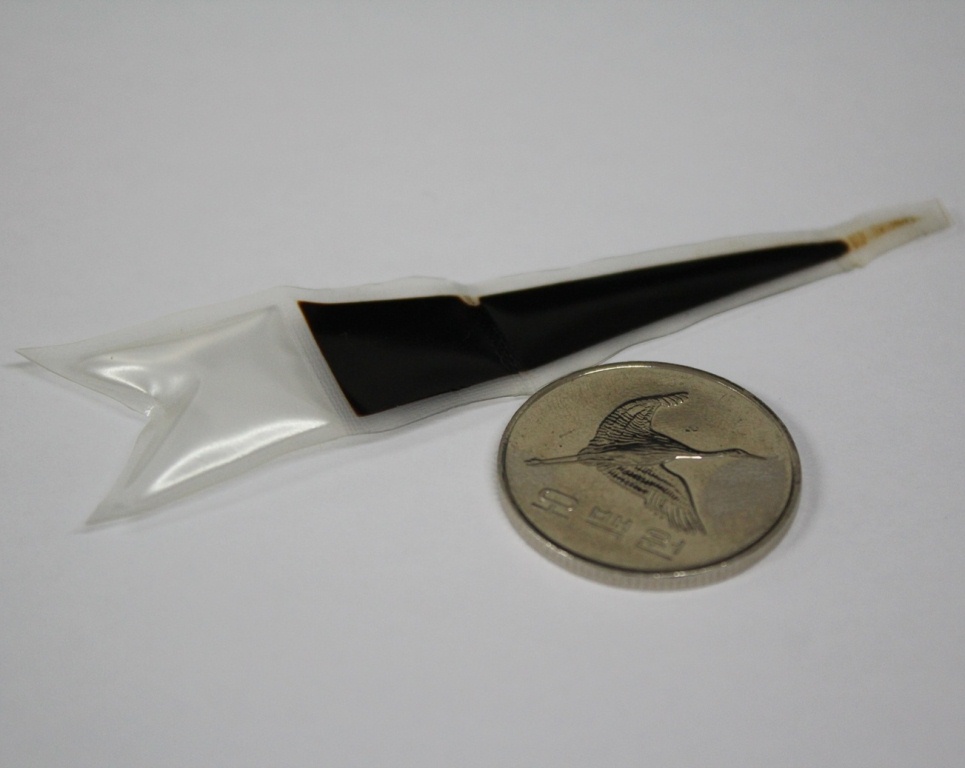
Ferrofluid micro-robot
swiming soft micro-robot.
Powered by electromagnetic actuator.
Korea - 2015

Micro-pump device
Peristaltic motion device.
Controllable pump for micro injections.
Korea - 2015

Capsule micro-robot
Capsule endoscope device is used to record internal images of the gastrointestinal tract.
It contains a tiny camera and an array of LEDs powered by a batteries.
Korea - 2015