Type of Projects
Micro-robots, Climbing robots, Wheeled robots, Legged robots, Amphibious robots, Stationary robots, Micro-Fluids and Automation projects.
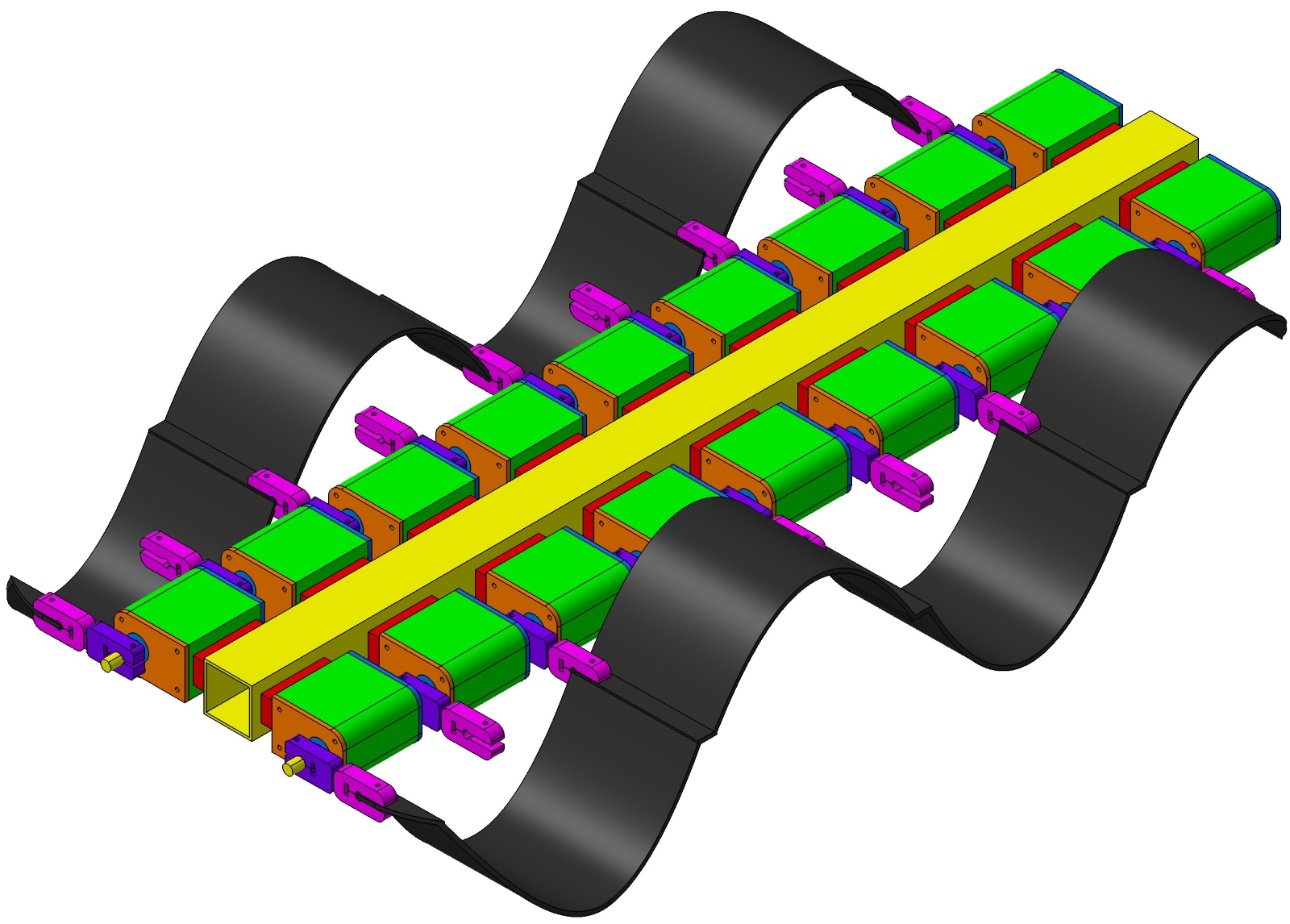
Amphibious Flatworm like Robot
Undulation swimming robot simulating a sea flatworm.
Biomimetic inspired design with 16 driven servomotors.
Colombia - 2026
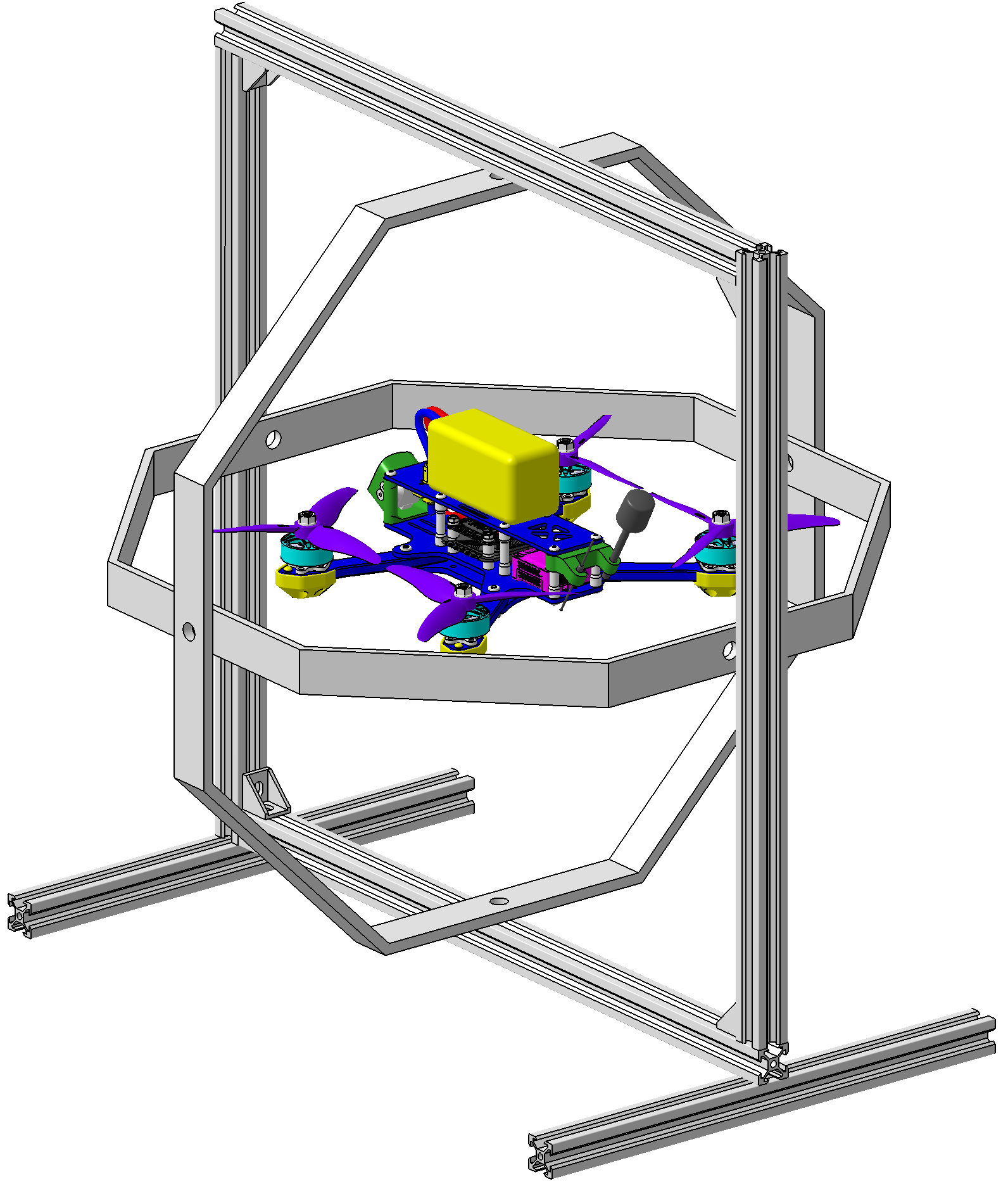
Jig Drone Tester Bench
Drones Fly Testing Bench.
3 DoFs gimbal device with position's registration.
Colombia - 2026

Mobile Hybrid Robot
Mobile hybrid platform is composed by 3 driven robots in one.
This platform is segway, differential and sterring robot at the same time.
Colombia - 2026
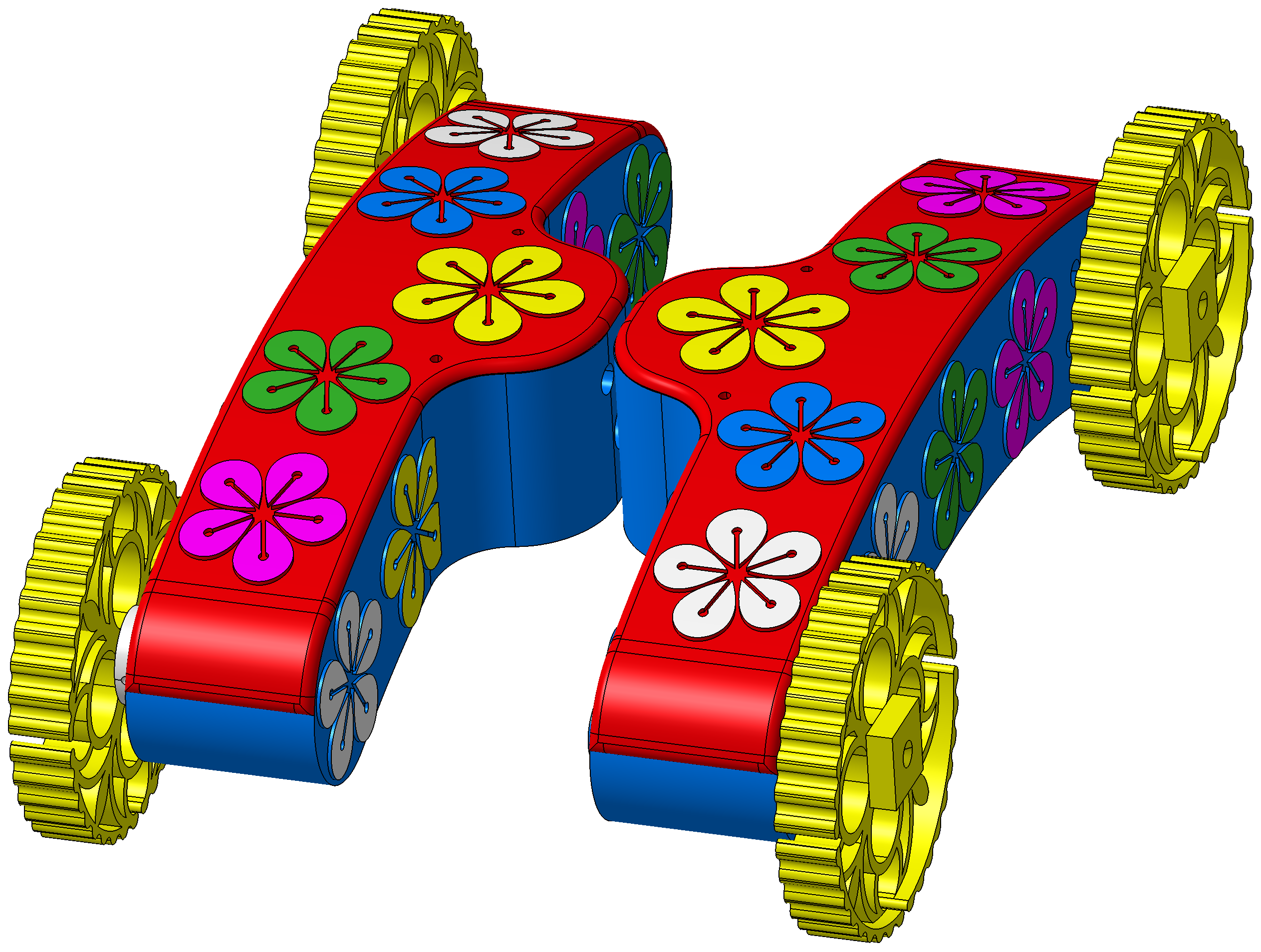
Mobile flexible Morphing-wheel Robot
Mobile flexible morphing-wheel platform with 3d printed wheels.
Platform with 4 active dc motors and 4 flexible wheels.
Colombia - 2026

Mobile Multiwheel Passive Robot
Snake Like robot platform with active joints and wheels.
biomimetic inspired design with high number of degrees of freedom.
Colombia - 2026

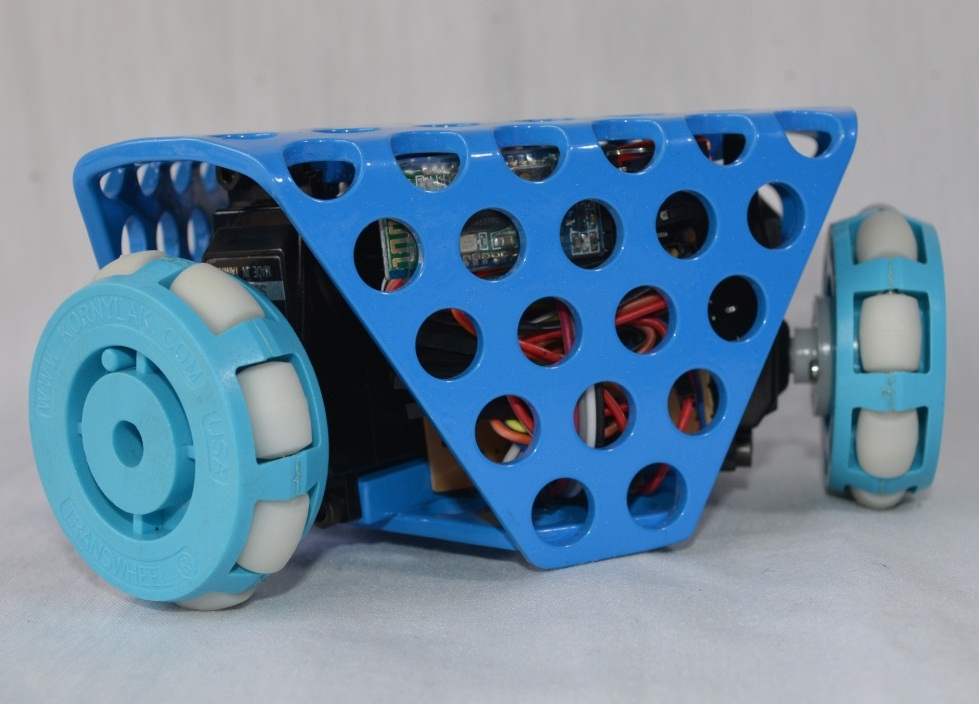
Mobile Coin Omniwheel Robot
Holonomic platform driven by 4 dc motors.
Omnidirectional mobile robot using 4 active omniwheels.
Colombia - 2026
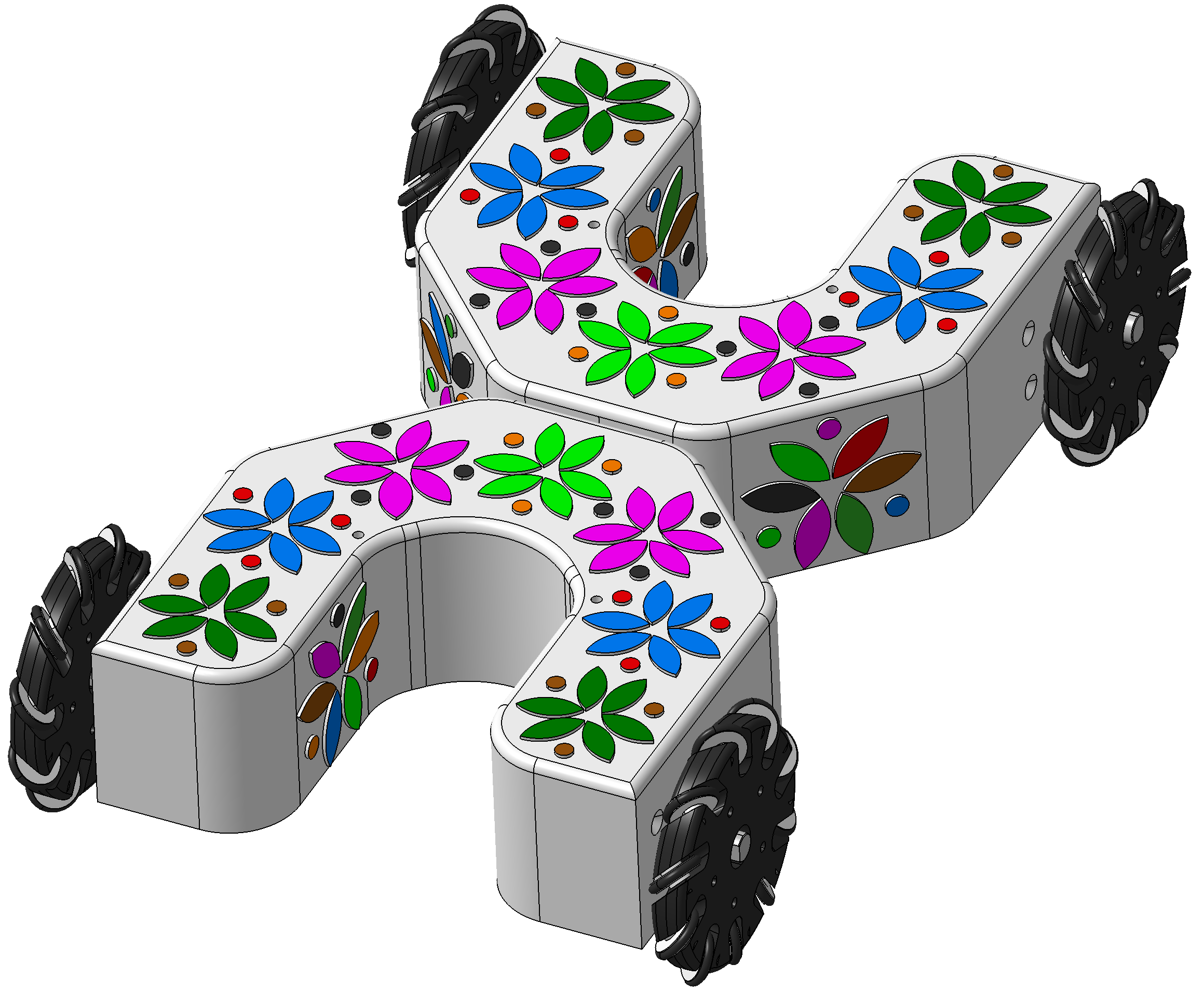
Mobile Coin Mecanum Robot
Mobile coin Mecanum robot platform is capable of moving in any direction.
This unique mobility of the robot is achieved by using special type of coin-wheels, called Mecanum Wheels.
Colombia - 2026

Flapping-wing like bird robot
Flapping-wing robot simulating the locomotion of birds.
Ornithopter robot is an flapping wings mechanism biomimetically inspired.
Colombia - 2025

Mobile Omni-Ball Robot
The omni-ball platform is multiple sphere robot able to move in any direction.
The three active spheres mechanism allows it to make sideways motion.
Colombia - 2025
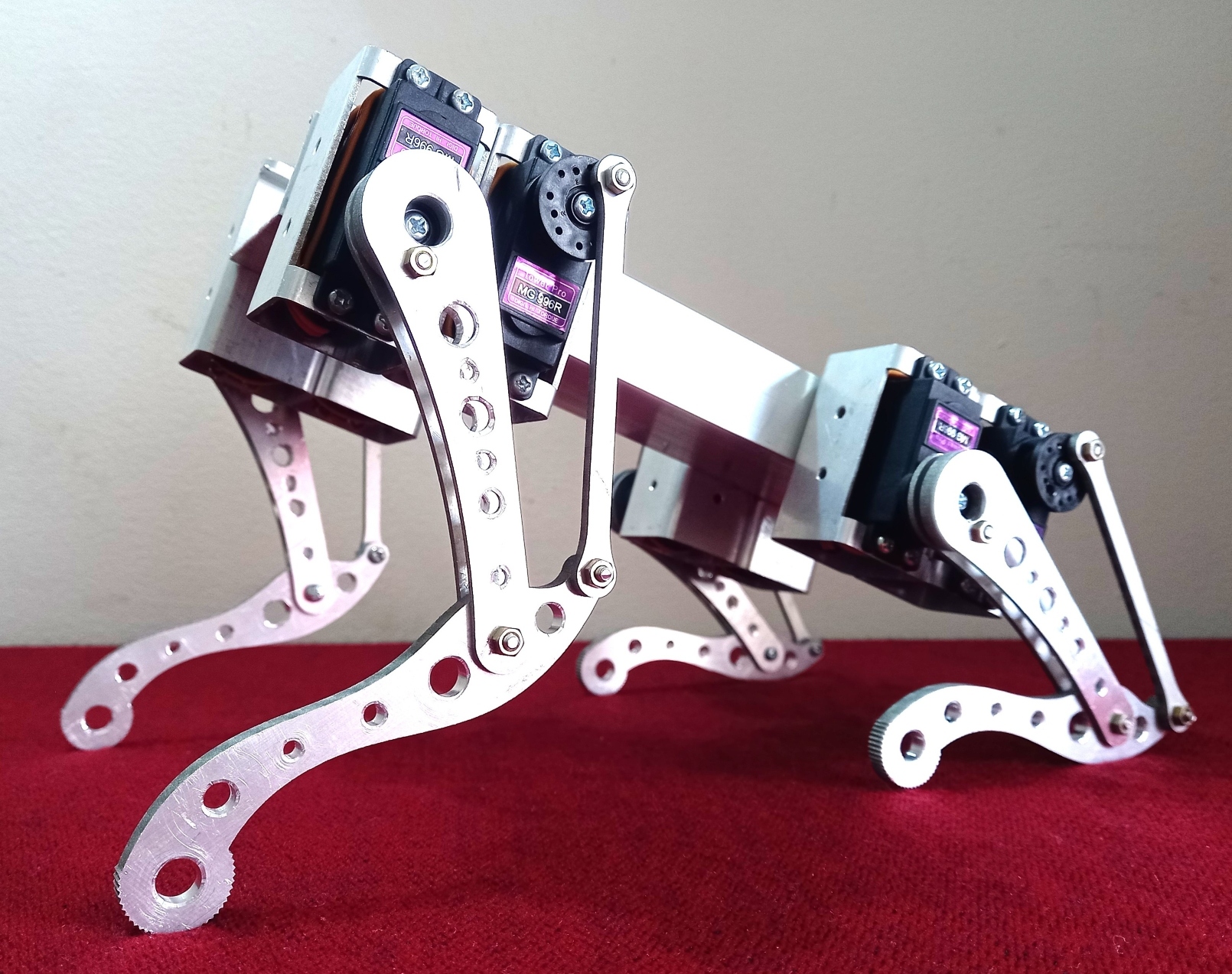
Walking Puppy like Robot
Quadruped walking robot simulating dog locomotion.
Biomimetic inspired design with 8 degrees of freedom.
Colombia - 2025
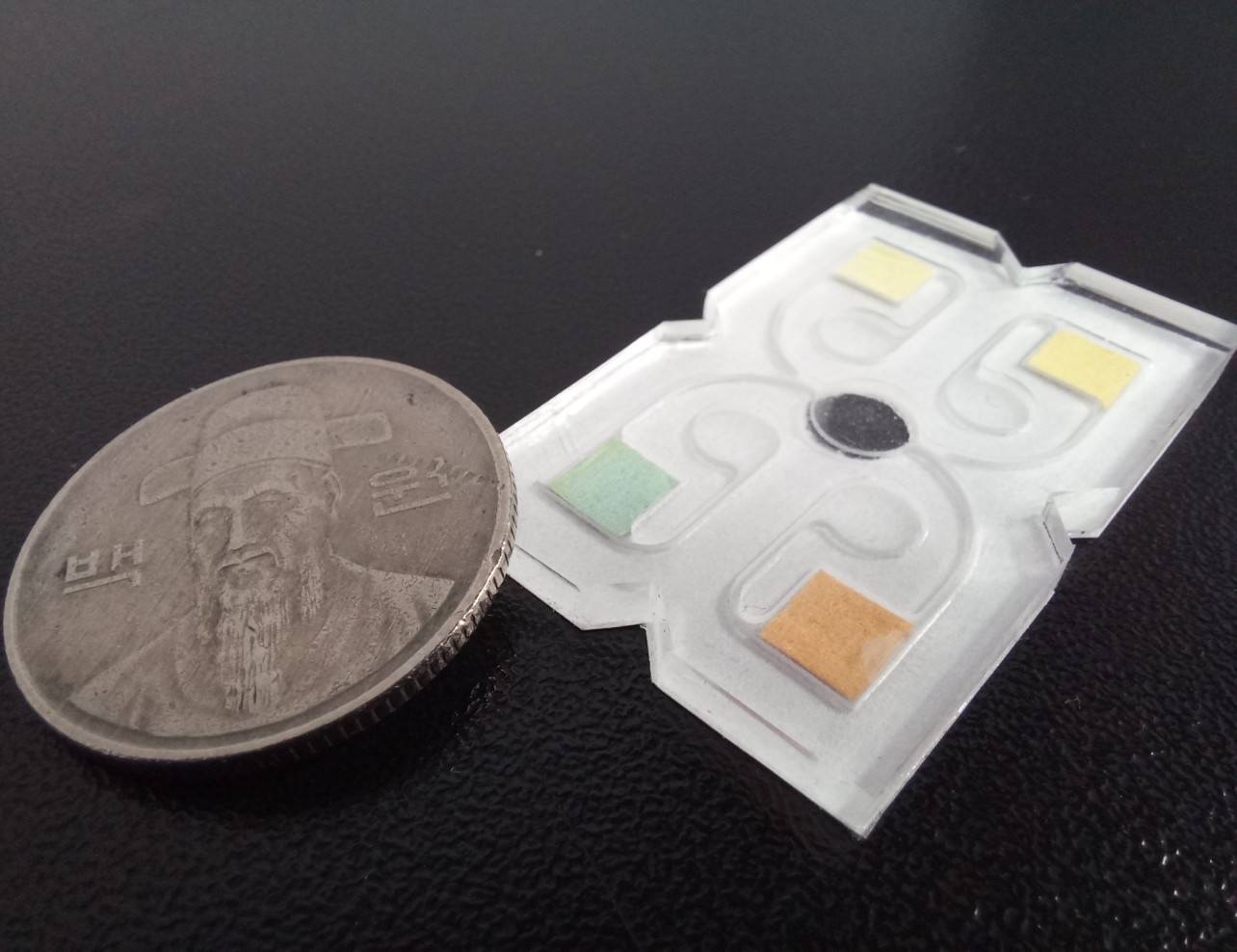
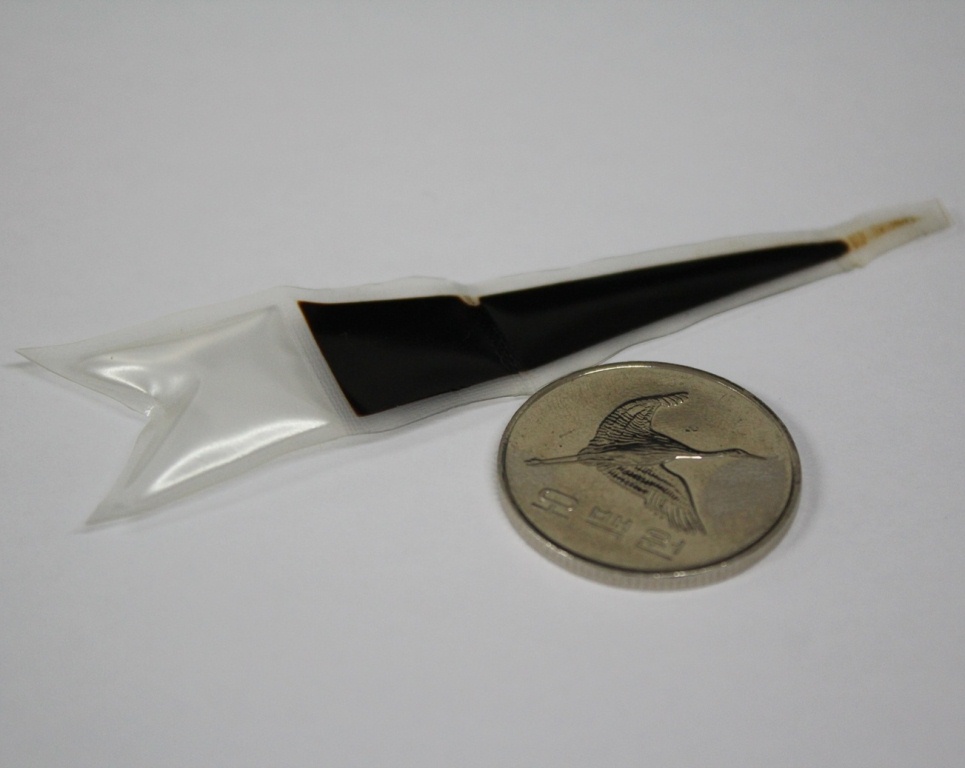
Werable Microfluidics Device
Werable Microfluidic device for sweat monitoring.
The micro-channels can collect and analize the fluid via biomarkets.
Korea, 2024
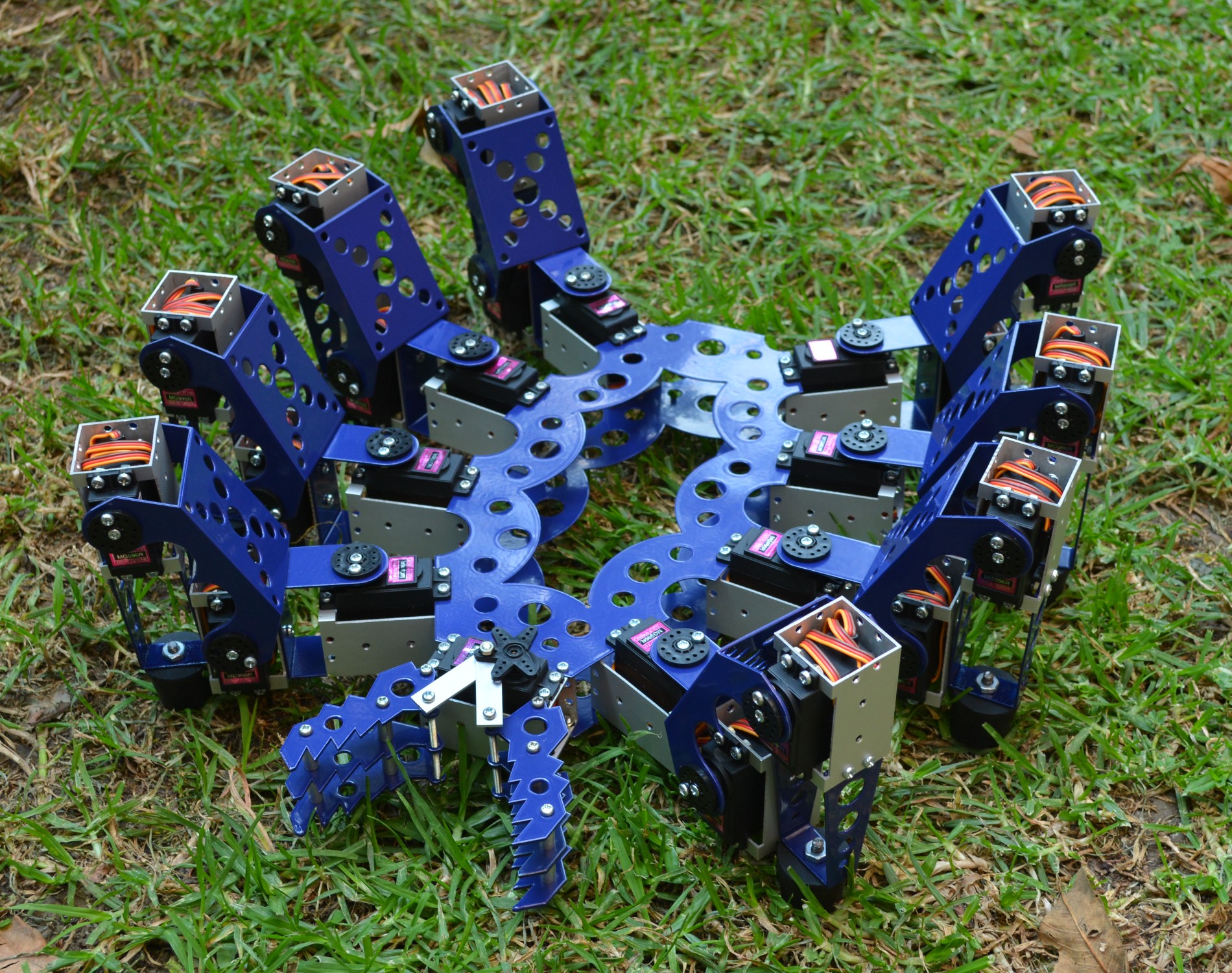
Arthopod like Robot
Walking robotics platform with 8 modular legs.
Octapod like robot with 24 servo-motors with 3 DOF on each leg.
Colombia - 2024
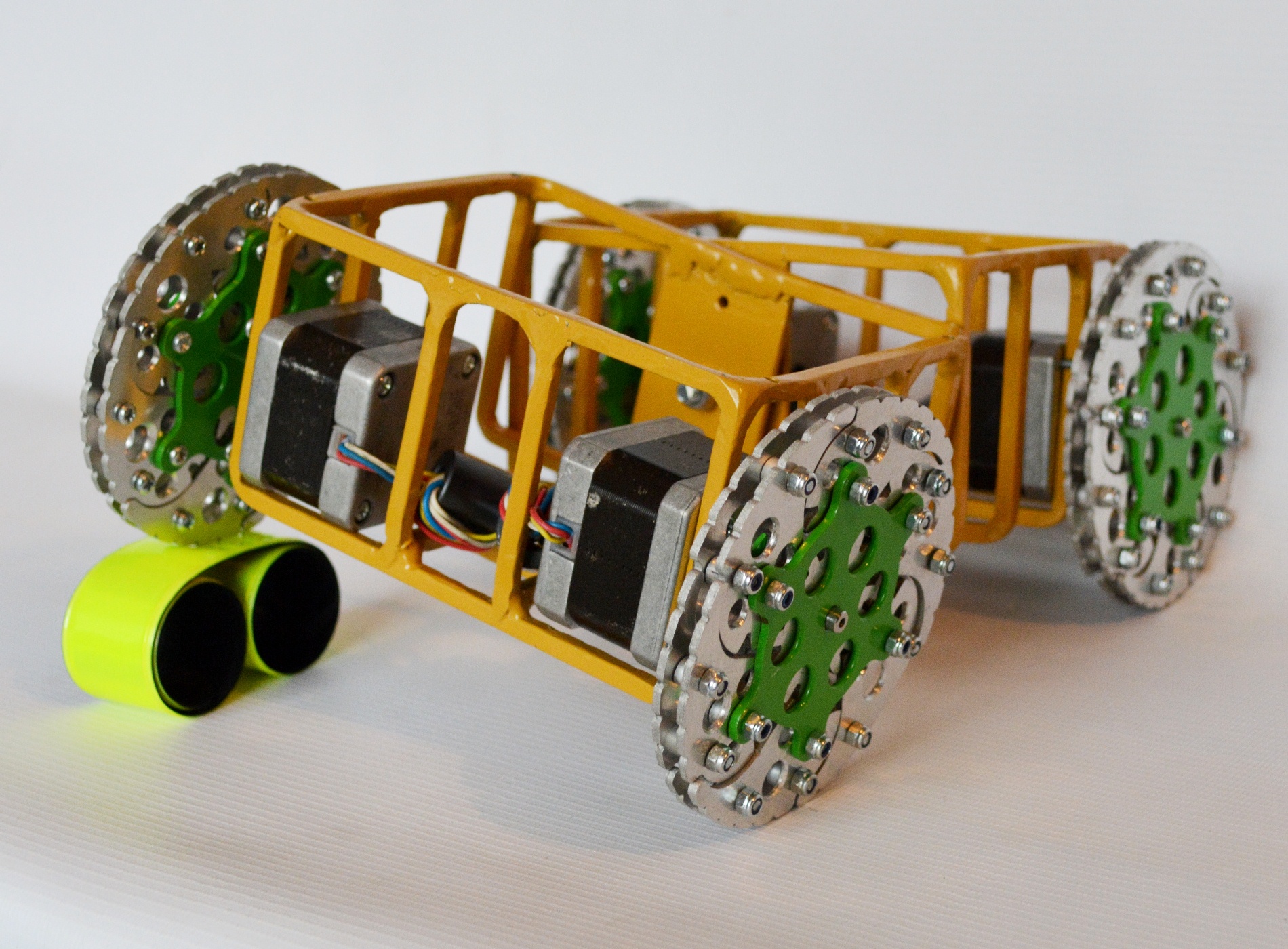
Mobile Rigid Morphing-wheel Robot
Mobile rigid morphing-wheel platform with modular wheels.
Platform with 4 active dc motors and 4 transformable wheels.
Colombia - 2024

Underwater Anguille like Robot
Snake like robot with anguilliform 3D locomotion for underwater enviroment.
Anguille like robot is a modular joint mechanism biomimetically inspired.
Colombia - Switzerland - 2024

Salamander like robot platform
Quadruped robot controlled via IoT.
Salamander robot with 23 servo-actuators inspired from emperor newt.
Colombia - 2023
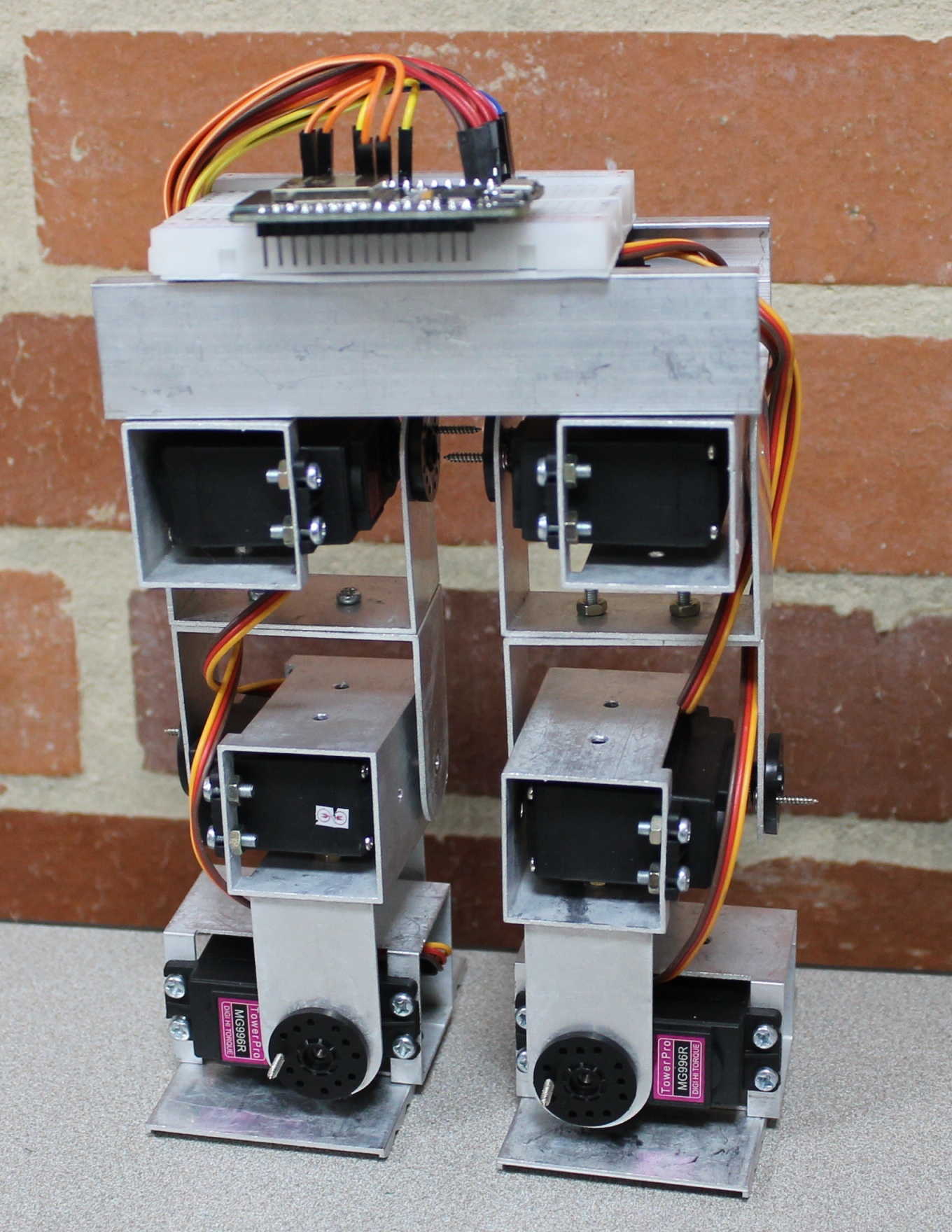
Modular bipedal robot
IoT Walking Robot.
Student project of legged mechanism controlled via IoT.
Colombia - 2023

Mobile wheels-legged Robot
Mobile hybrid platform of quadruple wheel and legs robot.
Platform with 4 active dc motors and 8 servo motors.
Colombia - 2023

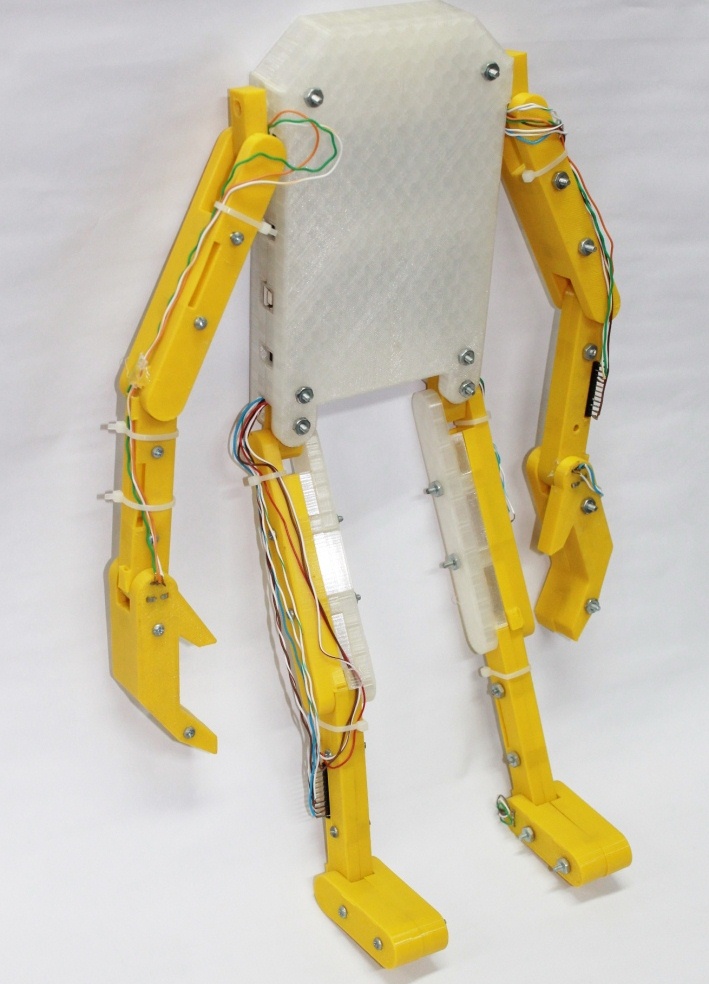
Humanoid like robot platform
Bipedal Robot controlled via IoT.
Humanoid robot with 5 DOF Legs and 3 DOF Arms.
Colombia - 2022

Walking Dog like Robot
Quadruped walking robot simulating dog locomotion.
Biomimetic inspired design with 12 degrees of freedom.
Colombia - 2022

Mobile wheels-legged Robot
Mobile platform with self-transform wheels into legs.
The platform is composed by 6 servo-motors that can be able to climb and move like wheeled vehicle.
Colombia - 2022

Snake like robot
Biomimetic inspired snake like robot.
Modular design of 16 DOF robot.
Colombia, - 2021

Mobile Rocker-Bogie Robot
The rocker-bogie platform is the suspension arrangement developed by NASA's Mars.
The rocker-bogie design has no springs or stub axles for each wheel.
Colombia - 2021

Mobile Omni-crawler Robot
The omni-crawler platform is caterpillar robot able to move in any direction.
The crawler mechanism allows it to realize the required sideways motion.
Colombia - 2021

Mobile Scissors Robot
Mobile scissors platform is bogie quadruple wheel robot.
Platform with 4 active motors with passive hinge body connection.
Colombia - 2021

Mobile Instantaneous Robot
Mobile Instantaneous platform with redundant actuation using conventional wheels.
Non-holonomic omnidirectional mobile robot using conventional wheels.
Colombia - 2021

Mobile Ballwheel Robot
Mobile platform with 3 DOF and one ball in contact with the floor.
The agile platform with 3 motors and omniwheels can stand up on the ball acting as wheel.
Colombia - 2021

Underwater Remote Operated Vehicle
Affordable ROV robot with depth/buoyancy control for visual inspections within 5 m depth.
Remote Operation Vehicles (ROV) are mainly identified as an underwater robot.
Colombia - 2020

Electromagnetic actuator for micro-robots
Magnetic actuation is the based motion control for micro-robots.
The magnetic field excited a permanent magnet by six concentrator coils.
Colombia, 2020

Mobile Mecanum Robot
Mobile Mecanum robot platform is capable of moving in any direction.
This unique mobility of the robot is achieved by using special type of wheels, called Mecanum Wheels.
Colombia - 2020

Underwater Lamprey like Robot
Snake like robot with Anguilliform locomotion for water environment inspection.
Assembly with 7 modules sections that move in a series of sinuous waves passing from head to tail.
Colombia - 2020

Mobile Multiwheel Active Robot
Snake Like robot platform with active joints and wheels.
biomimetic inspired design with high number of degrees of freedom.
Colombia - 2020

Mobile Segway Robot
Vertical control platform based in two active castor wheels.
Self-balancing platform with aligning wheels on the same axle.
Colombia - 2020

Mobile Caterpillar Robot
Mobile platform composed by two serial tracks like elongated wheels.
The tracked robot chassis also poses two extended arms for stairs climbing.
Colombia - 2020

Mobile Differential Robot
Mobile platform composed by two driven wheels and one orientable wheel.
This platform is also known Unicycle-type wheeled mobile robot.
Colombia - 2020

Mobile Omniwheel-Paso Robot
Holonomic platform driven by 3 stepper motors.
Omnidirectional mobile robot using 3 active omniwheels.
Colombia - 2020

Continuous Redundant Robot with Winch Drivers
Cable manipulator driven by 4 winch actuators.
Compoused by 1 segments with 6 modular sections, these can be add and remove like serial chain.
Colombia - 2019

Spherical Haptic Parallel Lightweight-Robot
The spherical haptic parallel manipulator consists of 3 rotary actuators with encoders connected by 6 angular link-bars from one fixed to one mobile platform.
The workspace result is external sphere motion, it could be used as 3D mice.
Colombia - 2019

Planar Parallel Lightweight-Robot
The planar parallel manipulator consists of 3 linear actuators and 3 rotary actuators connected with 6 arms to one fixed and one mobile platforms.
The result of this parallel manipulator are several constrains on its workspace.
Colombia - 2019

Spatial Parallel Lightweight-Robot
The spatial parallel manipulator consists of 3 linear actuators placed on each coordinate axis like a fixed platform.
The result of it parallel manipulator has a fast motion capability.
Colombia - 2019

Prismatic Parallel Lightweight-Robot
The prismatic parallel manipulator consists of 3 linear actuators placed vertically in the fixed platform. It is also know Delta robot.
The result of it parallel manipulator has a wide range of motions capability.
Colombia - 2018

Parallel Stewart Lightweight-Robot
A Gough-Stewart platform is a type of parallel robot that has six prismatic actuators, attached in pairs to three fixed positions on the platforms.
Devices placed on the top platform can be moved in six degrees of freedom.
Colombia - 2018

Continuous Redundant Robot
Cable manipulator driven by 6 lineal actuators.
Compoused by 2 segments with 7 modular sections, these can be add and remove like serial chain.
Colombia - 2018
Mobile Omniwheel-Servo Robot
Holonomic platform driven by 3 servo-motors.
Omnidirectional mobile robot using 3 motorized omniwheels.
Colombia - 2018
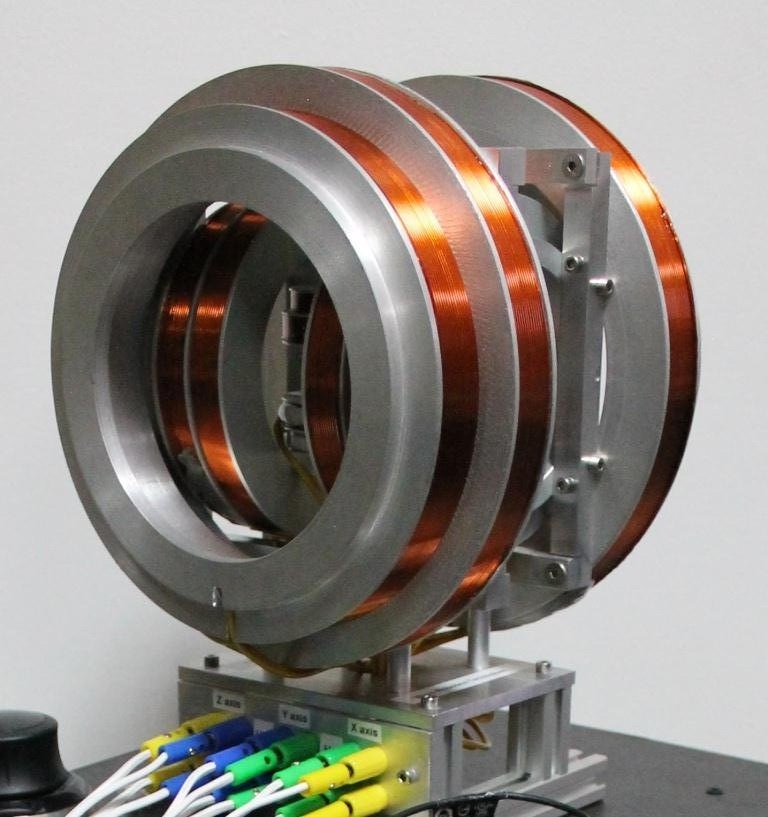
Electromagnetic actuator for micro-robots
Magnetic actuation is the based motion control for micro-robots.
The magnetic field excited a permanent magnet by Helmholtz and Maxwell circuits.
Colombia - Korea, 2017

Spherical Parallel Lightweight-Robot
The spherical parallel manipulator consists of two bodies connected through three in-parallel legs such that any motion of the end-effector is always on a sphere.
The 3-RRR SPM has parallel singularities within its workspace.
Colombia - 2017

Revolute parallel Lightweight-Robot - Delta
A delta robot is a type of revolute parallel robot. It consists of three arms connected to universal joints at the base.
The key design feature is the use of parallelograms in the arms, which maintains the orientation of the end effector.
Colombia - 2016

Micro-pump device
Peristaltic motion device.
Controllable pump for micro injections.
Korea - 2015
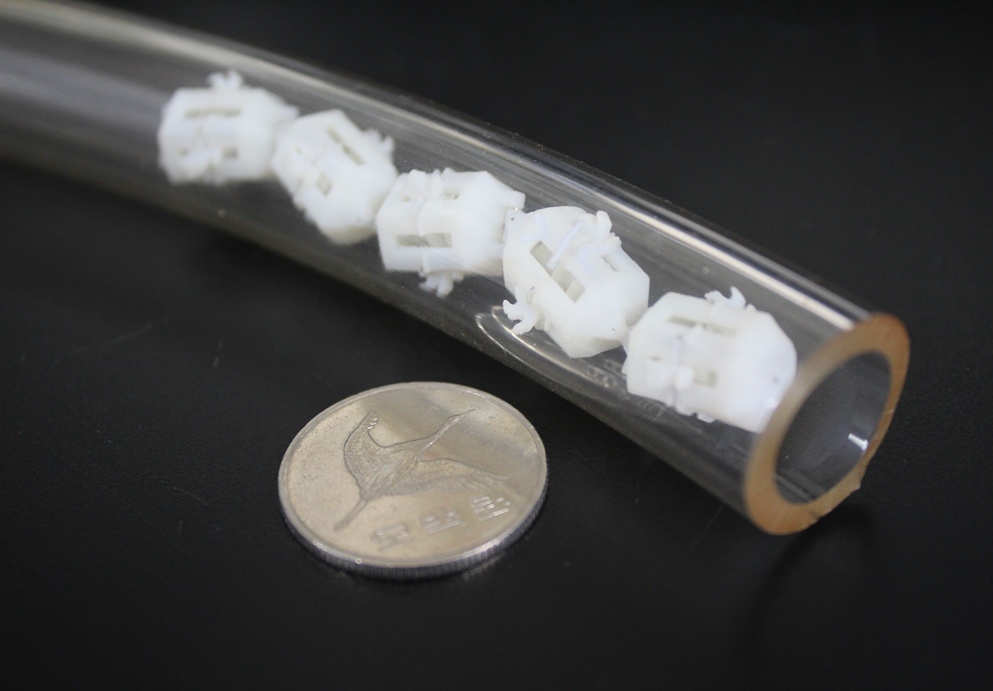
Caterpillar micro-robot
Needle walk micro-robot.
Powered by electromagnetic actuator.
Korea - 2015

Centipede micro-robot
Walking micro-robot.
Powered by electromagnetic actuator.
Korea - 2015

Lumbricus micro-robot
Friction motion micro-robot.
Powered by electromagnetic actuator.
Korea - 2015

Cockroach micro-robot
Wheeled micro-robot.
Powered by electromagnetic actuator.
Korea - 2015
Ferrofluid micro-robot
swiming soft micro-robot.
Powered by electromagnetic actuator.
Korea - 2015

Capsule micro-robot
Capsule endoscope device is used to record internal images of the gastrointestinal tract.
It contains a tiny camera and an array of LEDs powered by a batteries.
Korea - 2015
Motion Capture Robot
Humanoid robot for 3D capture animation motion.
Pasive motion robot with 16 DOF.
Colombia - 2013

Magnetic Technique
Wall Climbing Robot with Permanent Magnet Adhesion.
Wall-pipes cleaner robot for boiler industry aplications.
Colombia, Chile - 2012

Magnetic Technique
None Destructive Testing Robot for Continuous Thickness Inspection.
Wall climbing robot for steel surface adhesion.
Colombia - 2012

Hand like Robot
Human Hand like Robot for Automation Teaching.
14 DOF human anthropomorphic gripper as a didactic tool.
Colombia, - 2012

Exoskeleton Robot
Bipedal walking robot.
Exoskeleton Robot for Elderly and Disabled Persons.
Sweden - 2011

Tele-operated robot
Tele-operated Explosive Bombs Deactivator Robot.
Colombian Research Council - Colciencias.
Colombia - 2011

Manipulator Robot
Virtual reality devices controlled robotics system.
Omniwheels Mobile platform with 6 DOF Manipulator Robot Arm.
Colombia - 2010
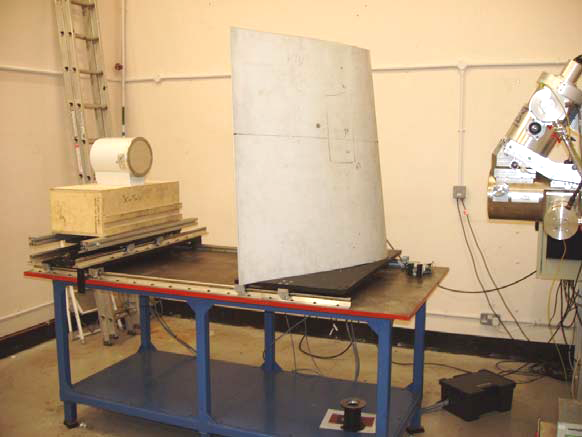
windturbine scaner robot
Scanner of 5 DOF for X-ray Computed Tomography Inspection in Wind Turbines Blades.
Prototype of high energy micro-focus X-ray scanner system.
England, Wales - 2010

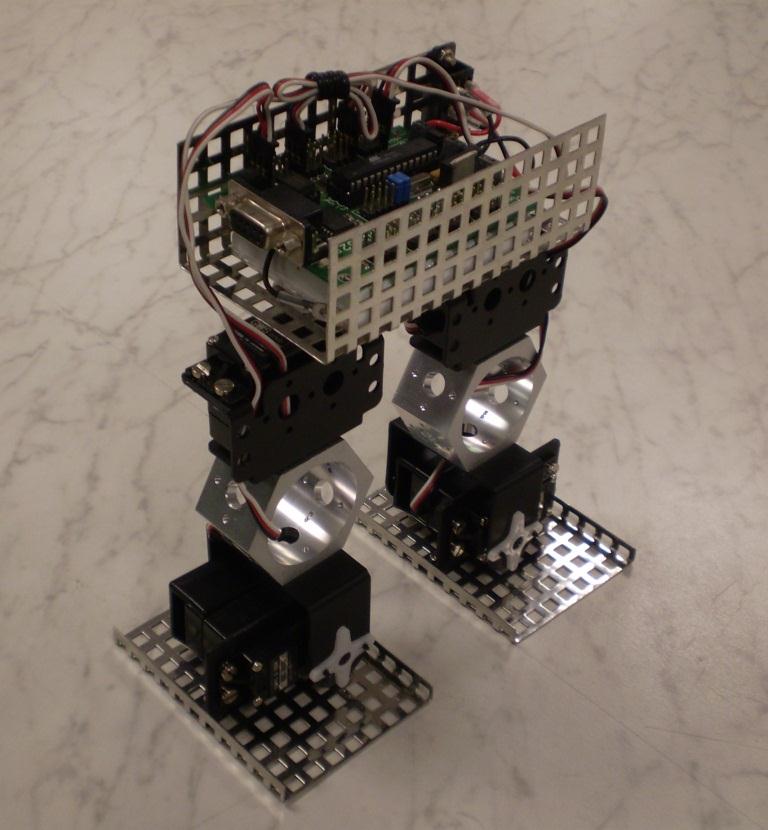
Humanoid Robot
Bipedal Robot controlled via wirelessly.
Humanoid robot with 3 DOF Legs and 4 DOF Arms.
Colombia - 2009

Stronger Robot
Wall Climbing Robot with Permanent Magnet Adhesion.
Climbing Cooperating Robots for Fast and Flexible Manufacturing of Large Scale Engineering Structures.
England, Frace, Italy, Greece - 2009

friction Technique
Climbing Ring Robot for Inspection of Offshore Wind Turbines.
1st place, Industrial Innovative Robot, highly commanded - Emerald.
England, Wales - 2008

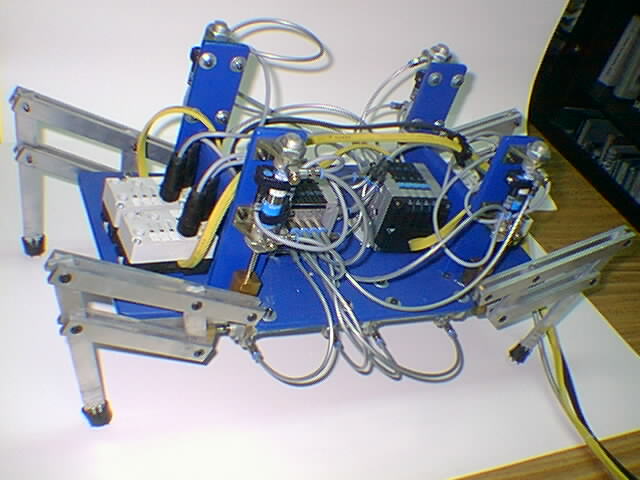
Spider like robot
Six Legs robot with 18 DOF.
Bio-mimetically inspired spider like robot.
England, Colombia - 2008

FPSO robot
Amphibious NDT Robot for Floating Production Oil Storage Tanks (FPSO).
Plate wave technique of none destructive testing.
England, Greece - 2007
Bipedal robot
Walking with Robots.
Royal Academy of Engineering - London Engineering Project.
England - 2007

Omniwheels underwater robot
Amphibious Wall Climbing Robot for NDT Inspection.
Underwater climbing robot with suction adhesion.
England - 2007

Gripping Technique
Inward Pipeline Wheeled Scanning Robot.
Pipe climbing robot with friction adhesion.
England, Colombia - 2006

Vortex Technique
Wireless Wall Climbing Robot with propeller-Vacuum Adhesion.
Wall climbing robot for any surface adhesion.
England - 2006

Suction Technique
Underwater Wall Climbing Robot with Propeller Adhesion.
Underwater Wall Climbing Robot for Nuclear Pressure Vessel Inspection.
England - 2006

Magnetic Technique
Wall Climbing Robot with Permanent Magnet Adhesion.
Most Industrial Innovative Wall Climbing Robot - Emerald.
England - 2005

wall competition for climbing robots
Modular metalic wall for climbing robot competition.
Mock-up of magnetic wall for climbing robots.
England - 2005
Quadruped Robot
Quadruped walking robot.
Electro-Pneumatics Robot with Quadruped Locomotion Controlled via AS-i Fieldbus.
Colombia - 2000

Portable station generator of electrical power
Alternative electrical power generator for away house.
Hydroelectric power generator, cross flow technique.
Colombia - 1998