
Spherical haptic parallel Lightweight-robot
Spherical haptic parallel Lightweight-robot
Spherical haptic parallel Lightweight-robot
Spherical haptic parallel Lightweight-robot
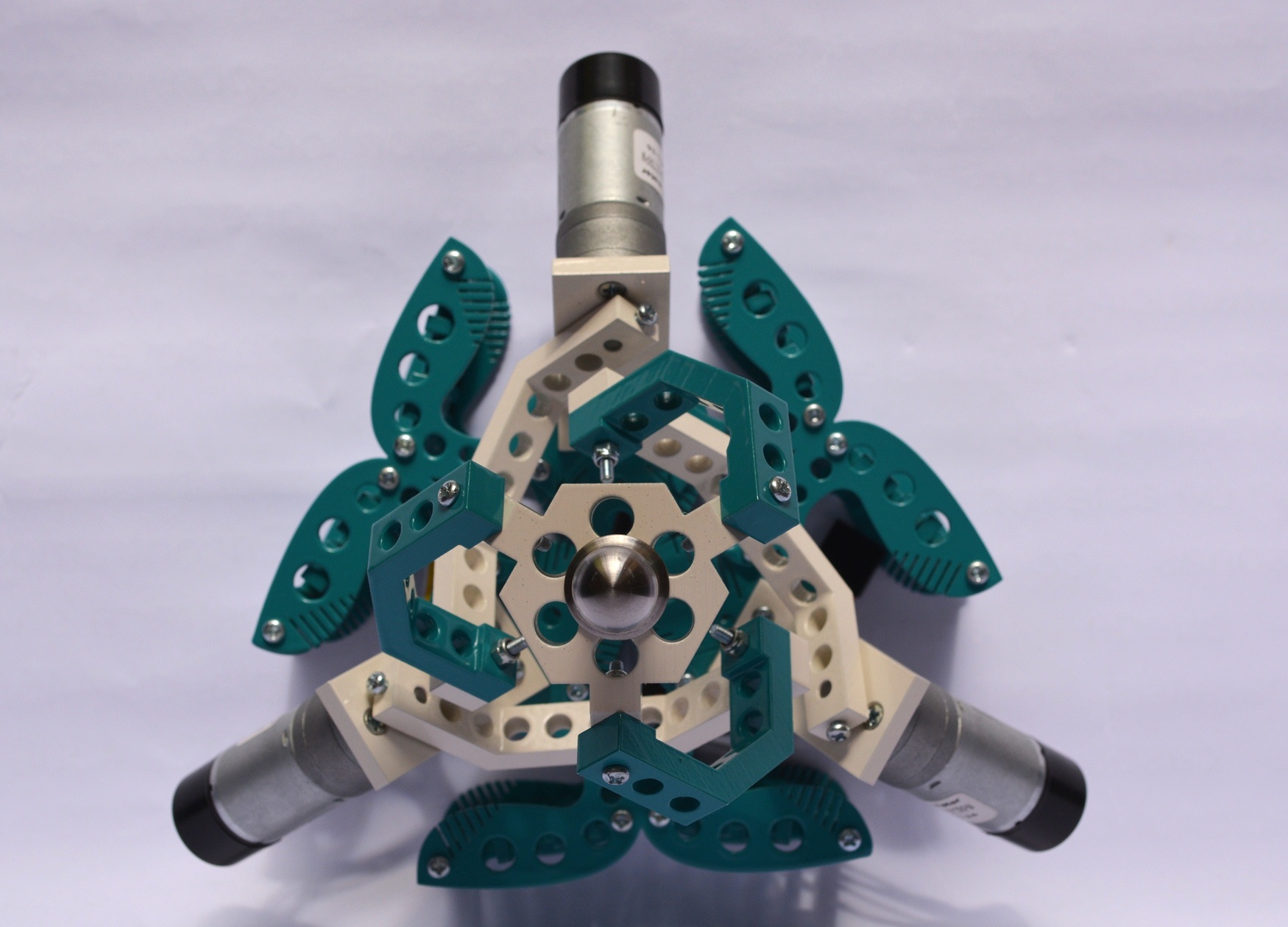
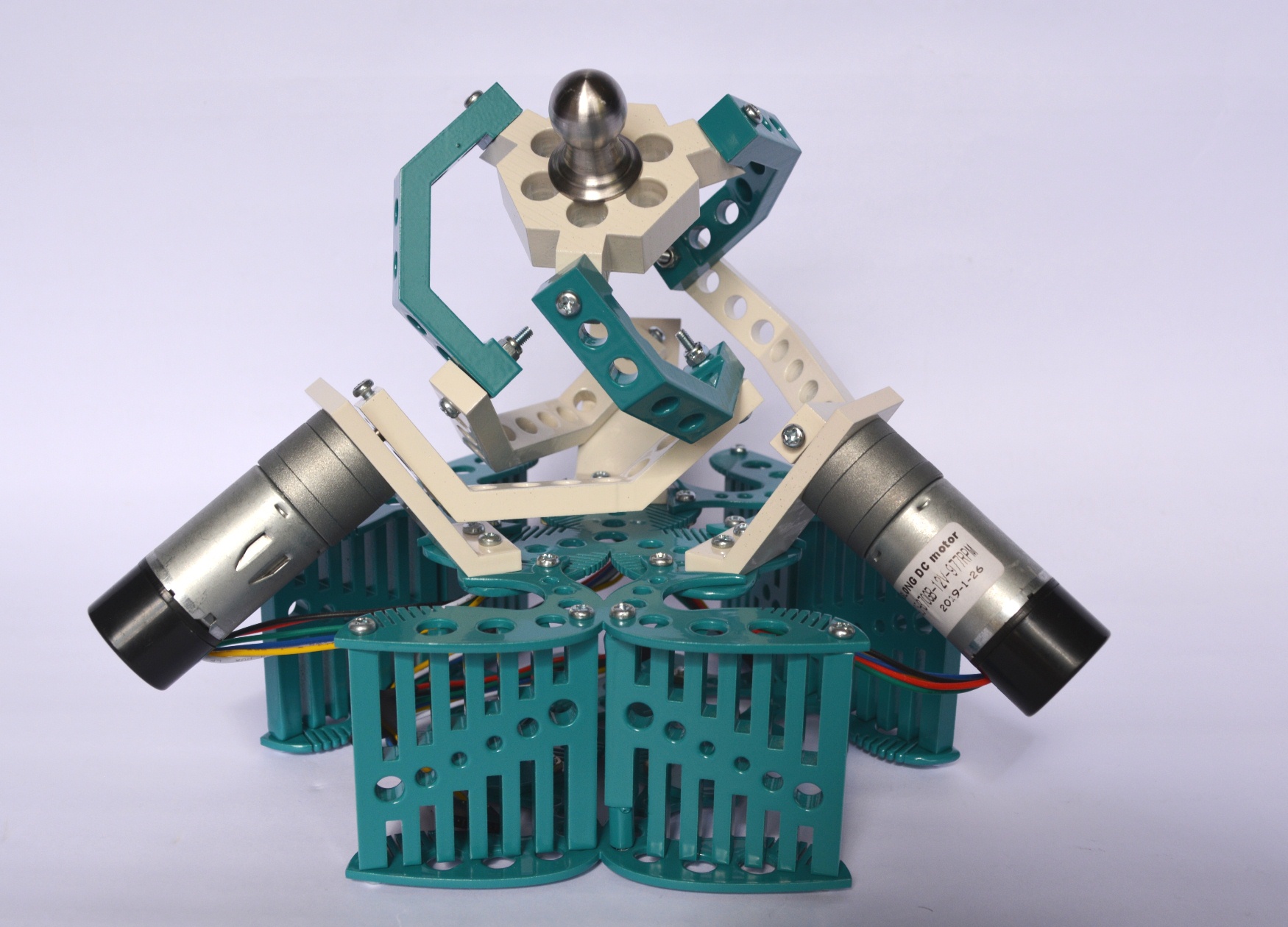
This Spherical haptic parallel Lightweight-robot is being design with aim of improve the knowledge of robotics teaching. The structure consists of 3 revolute actuators connected by two arms from one fixed to one mobile platforms.
The base platform is connected by three pairs of angular parallels link-bars. The robot generated the motions in a 3D spherical workspace reproduced on its mobile platform.
Colombia - 2019
Hernando Leon-Rodriguez
Byron Perez Gutierrez