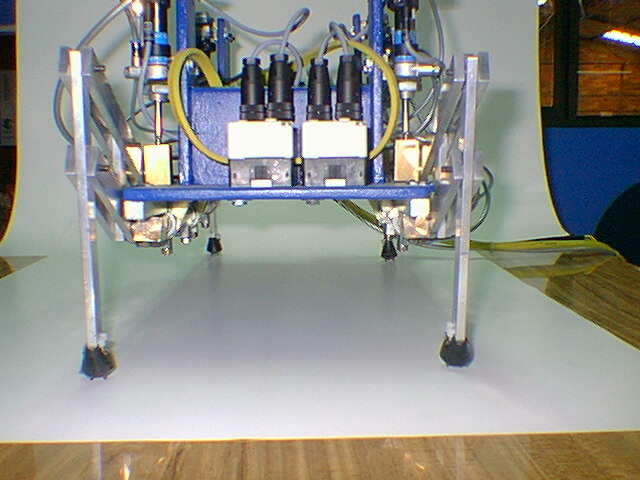
Quadruped robot front view
Quadruped robot front view
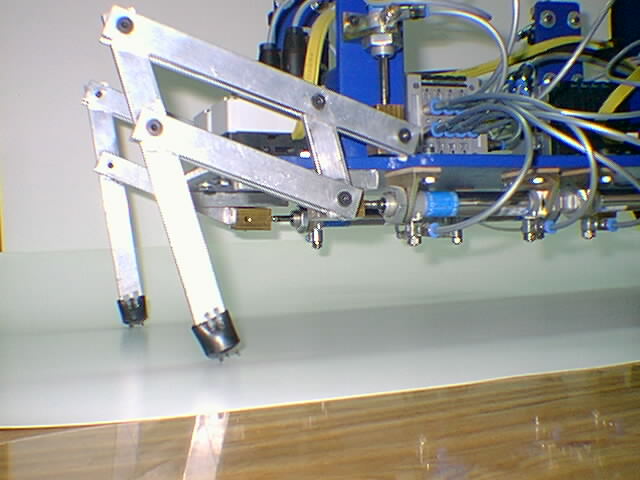
Pantograph leg mechanism quadruped robot
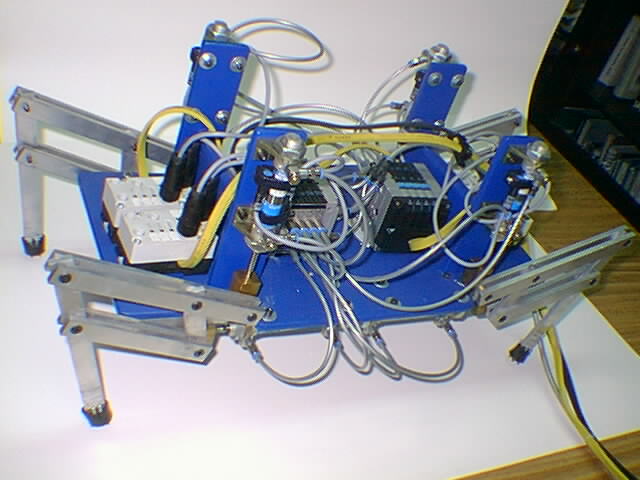
Pneumatics valves As-i field bus of quadruped robot
This robot is based in develop of quadruped walking robot powered by pneumatics and controlled by Festo-PLC via AS-i bus protocol. The robot is composed of pneumatic devices as application of automation project. Its body is been designed in MDF with the aim of decrease its weight and increase elasticity and performance. It is carry one pneumatic module with 8 single solenoid valves, 4 digital sensors modules and 8 attached pneumatic actuators placed by pairs on each corner of the body frame.
The walking robot is composed by four symmetric legs based in the articulation of the pantograph mechanics; it means for each mm of motion in every actuator it becomes several numbers of times amplified in the end of the feet. Each leg is made-up in aluminium and is powered by two actuators. One produces the motion in Z axis and the other in X axis. Each actuator has two magnetic sensors with the purpose of known the position of each leg.
Colombia - 2000
Hernando Leon-Rodriguez
Julian Davila Gilede
Enrique Forero
Rodrigo Guarnizo