Remote Operated Vehicle
Remote Operated Vehicle
Remote Operated Vehicle
Remote Operated Vehicle
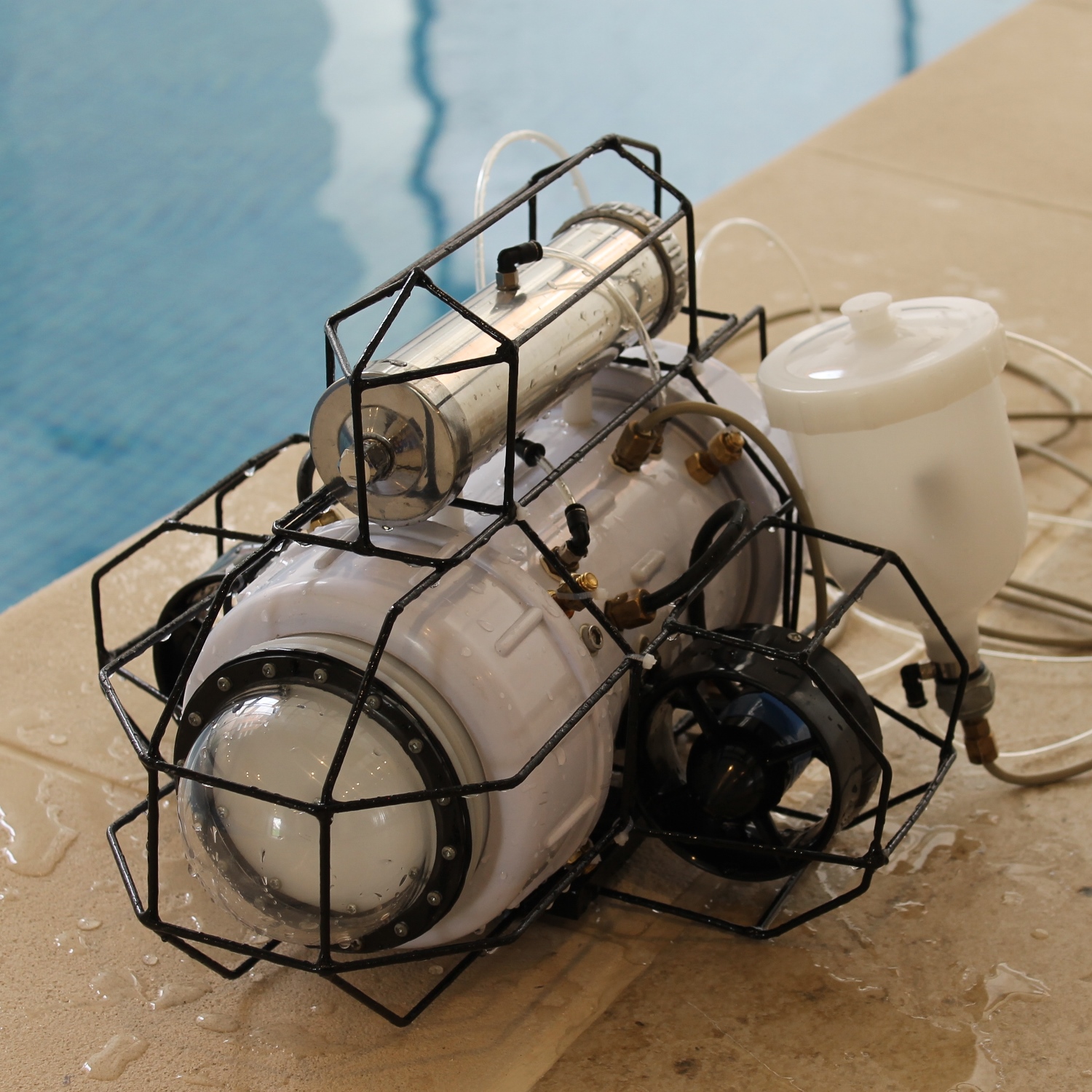
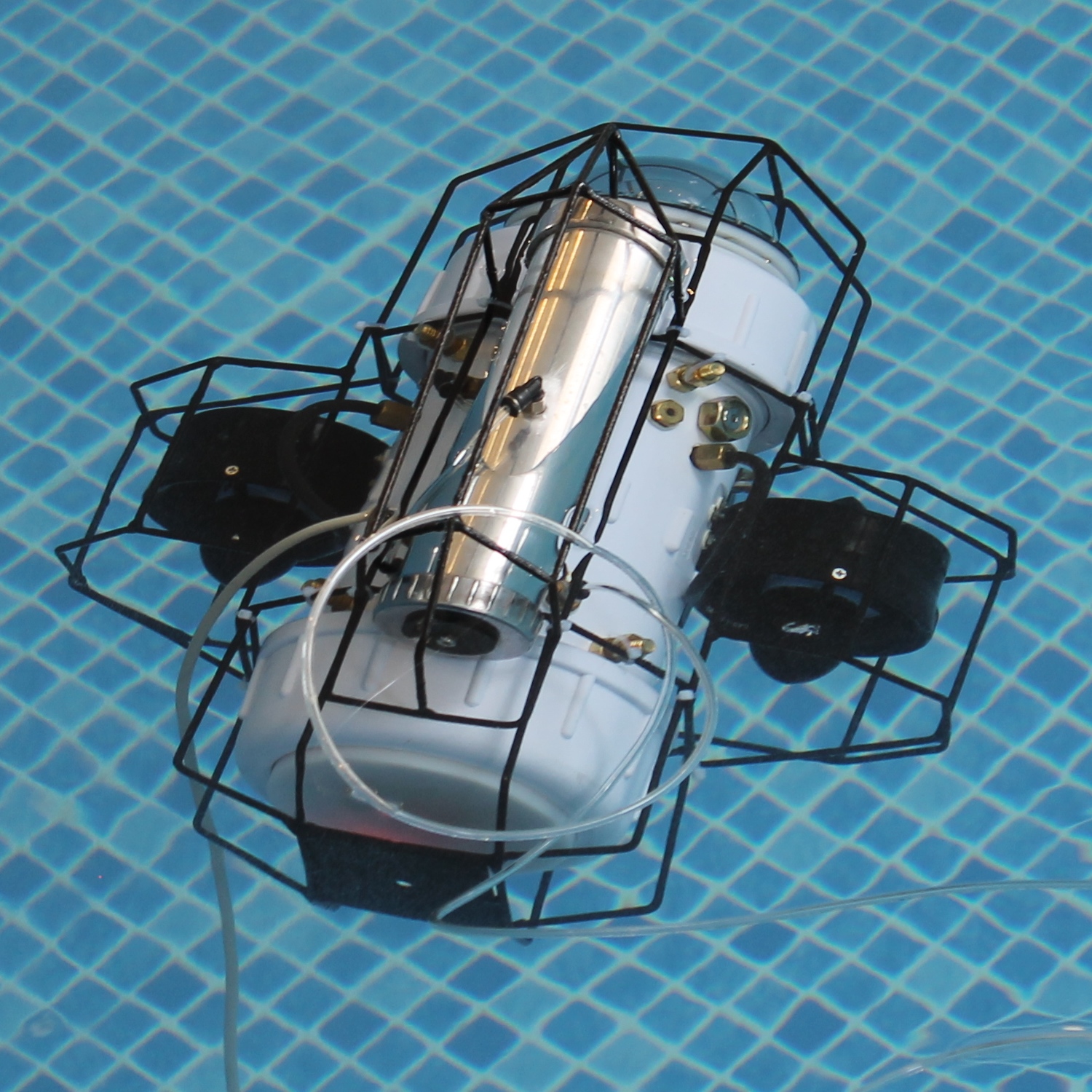
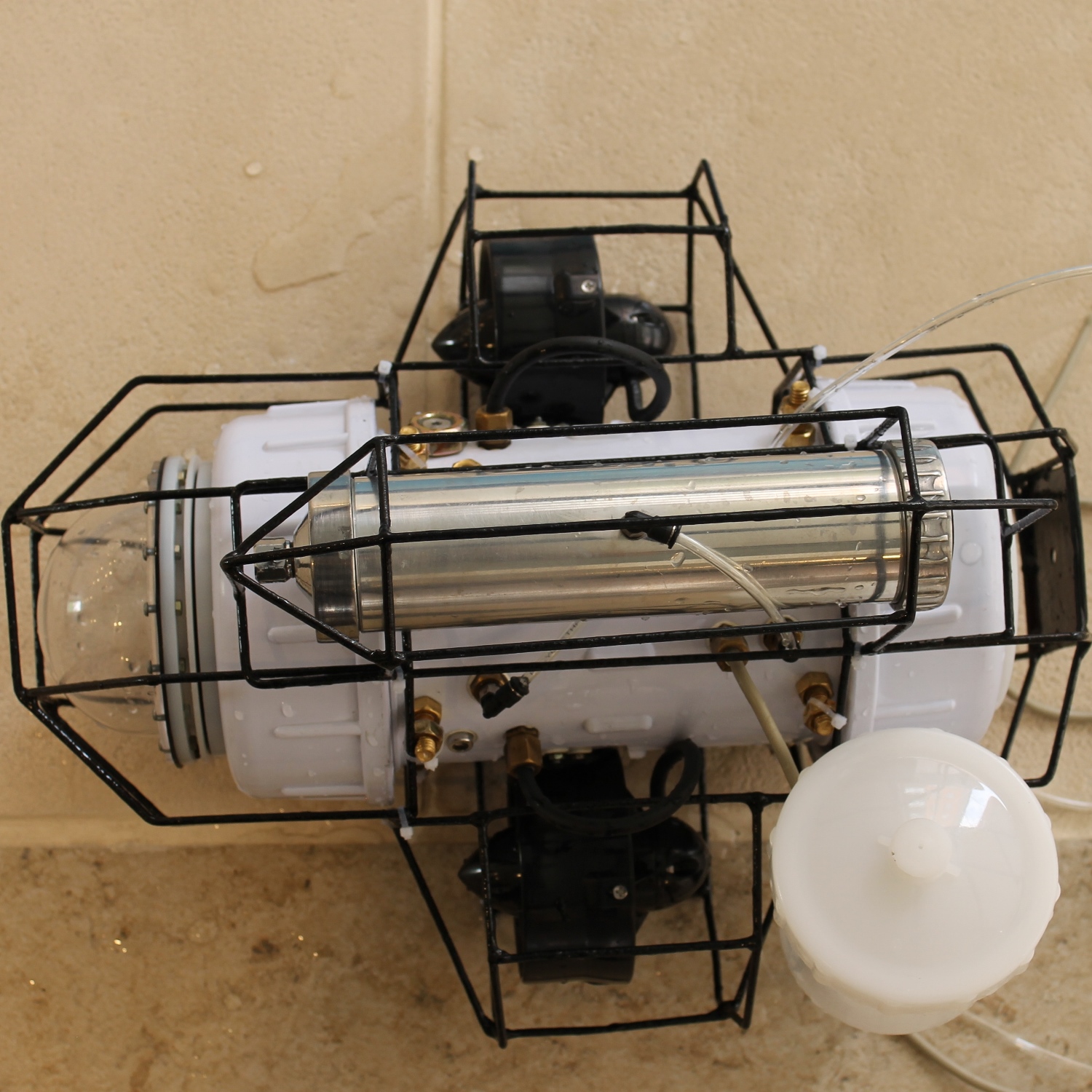
Remote Operation Vehicles (ROV) are mainly identified as an underwater robot combined by integration of mechanical characteristics of mobile robots like type of actuators and their associated drivers, power supply, communication and complementary electronics.
The projects is a development of affordable ROV robot with the aim of performing visual inspections within 5 m depth with depth/buoyancy control. The robot can be control by sending commands to find a position by PID control. The robot motion uses a basic control implemented via Bluetooth.
Colombia - 2020
Hernando Leon-Rodriguez
Santiago Noriega