
Spatial parallel Lightweight-robot
Spatial parallel Lightweight-robot

Spatial parallel Lightweight-robot
Spatial parallel Lightweight-robot
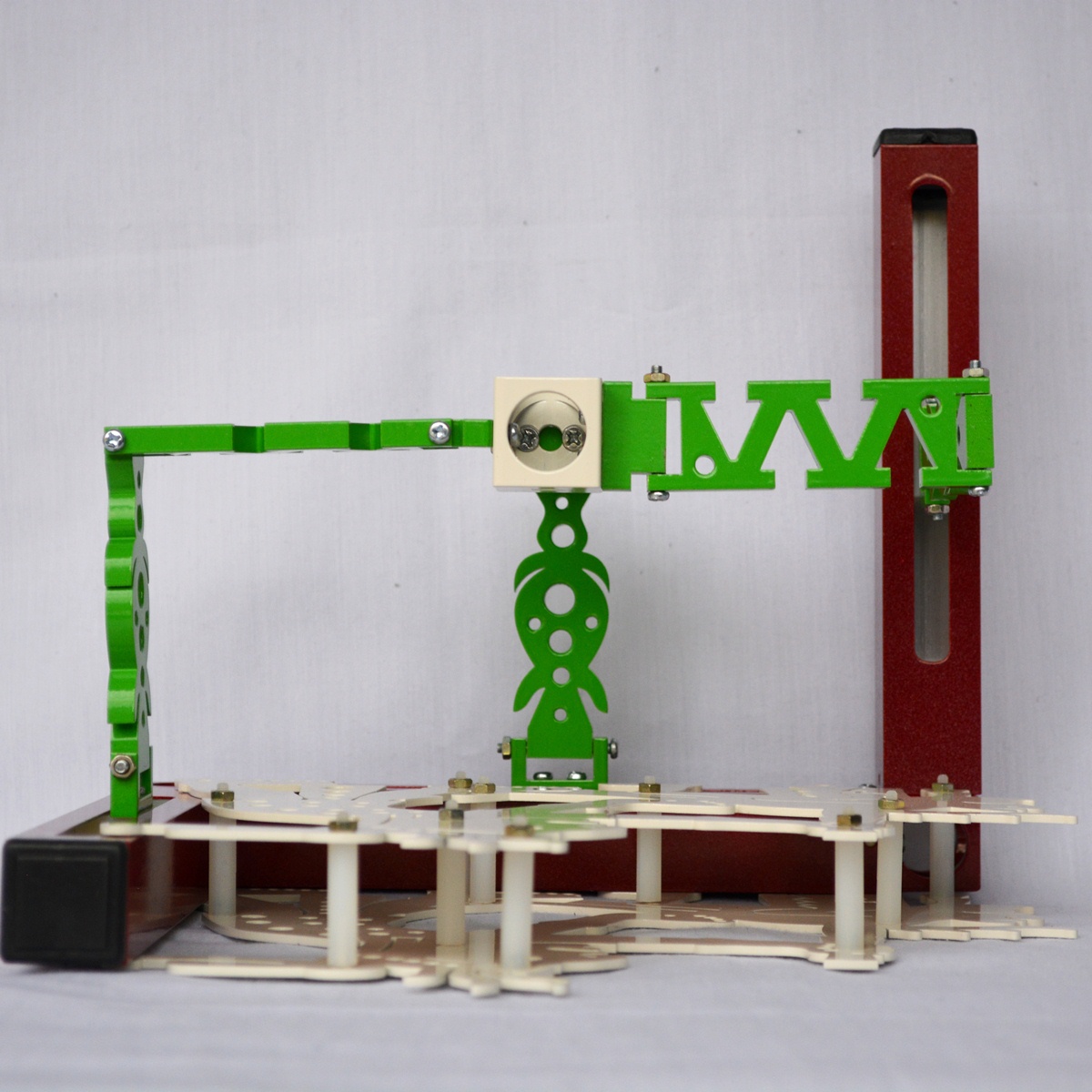
This Spatial parallel Lightweight-robot is being design with aim of improve the knowledge of robotics teaching. The structure consists of 3 prismatic actuators connected by two straight bars with a cube as a mobile platform.
The base platforms is a Cartesian arranges motions, however the two mobile bars generates a none vertices workspace cube. The robot generated the motions by three liner-motors fixed to the base platform.
Colombia - 2019
Hernando Leon-Rodriguez
VR-CAD