Walking motions hexapod robot
Walking motions hexapod robot

Standing-down hexapod robot

Standing-up hexapod robot
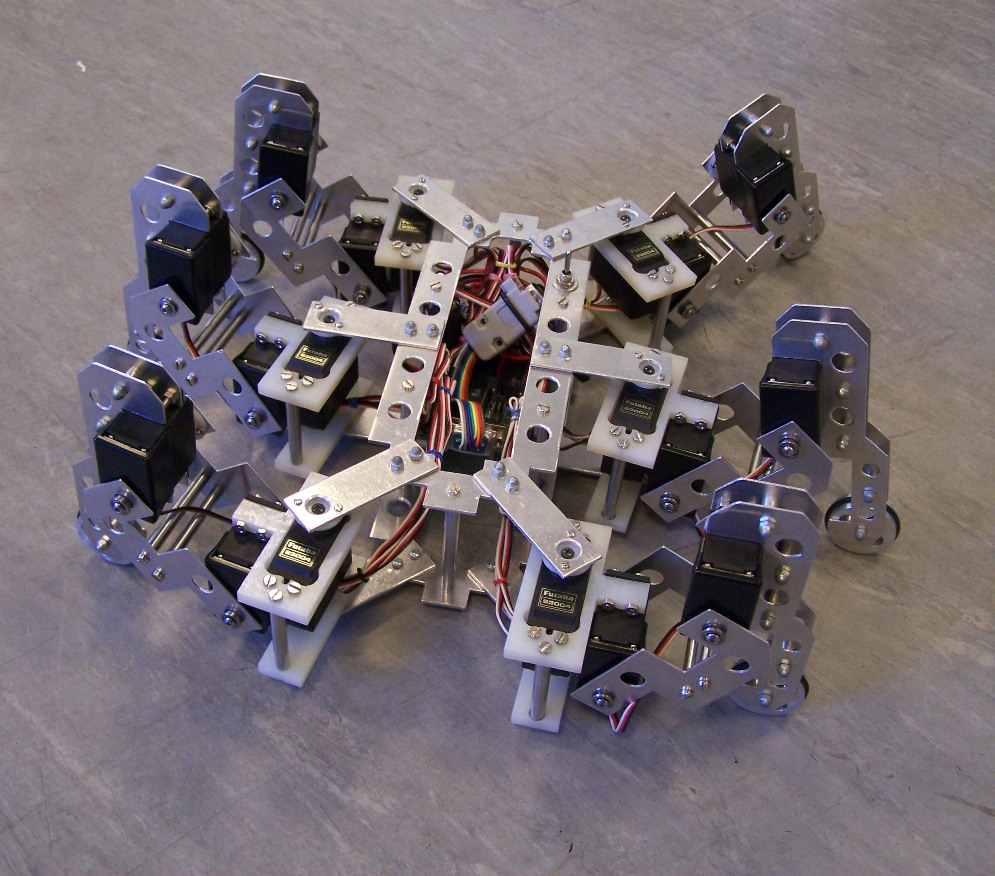
A biologically inspired hexapod robot is a mechanical vehicle that walks on six legs. Since a robot can be statically stable on three or more legs, a hexapod robot has a great deal of flexibility in how it can move. If legs become disabled, the robot may still be able to walk. Furthermore, not all of the robot's legs are needed for stability; other legs are free to reach new foot placements or manipulate a payload.
Hexapod designs vary in leg arrangement. Insect-inspired robots are typically laterally symmetric or radially symmetric. Typically, individual legs range from two to six degrees of freedom. Hexapod feet are typically pointed, but can also be tipped with adhesive material to help climb walls or wheels so the robot can drive quickly when the ground is flat.
Most often, hexapods are controlled by gaits, which allow the robot to move forward, turn, and perhaps side-step, alternating tripod, quadruped, one leg at a time. Gaits for hexapods are typically stable, even in slightly rocky and uneven terrain. Motion may also be nongaited, which means the sequence of leg motions is not fixed, but rather chosen by the computer in response to the sensed environment. This may be most helpful in very rocky terrain, but existing techniques for motion planning, which are computationally expensive.
England, Colombia - 2008
Hernando Leon-Rodriguez