
Mobile instantaneous robot
Mobile instantaneous robot
Mobile instantaneous robot
Mobile instantaneous robot
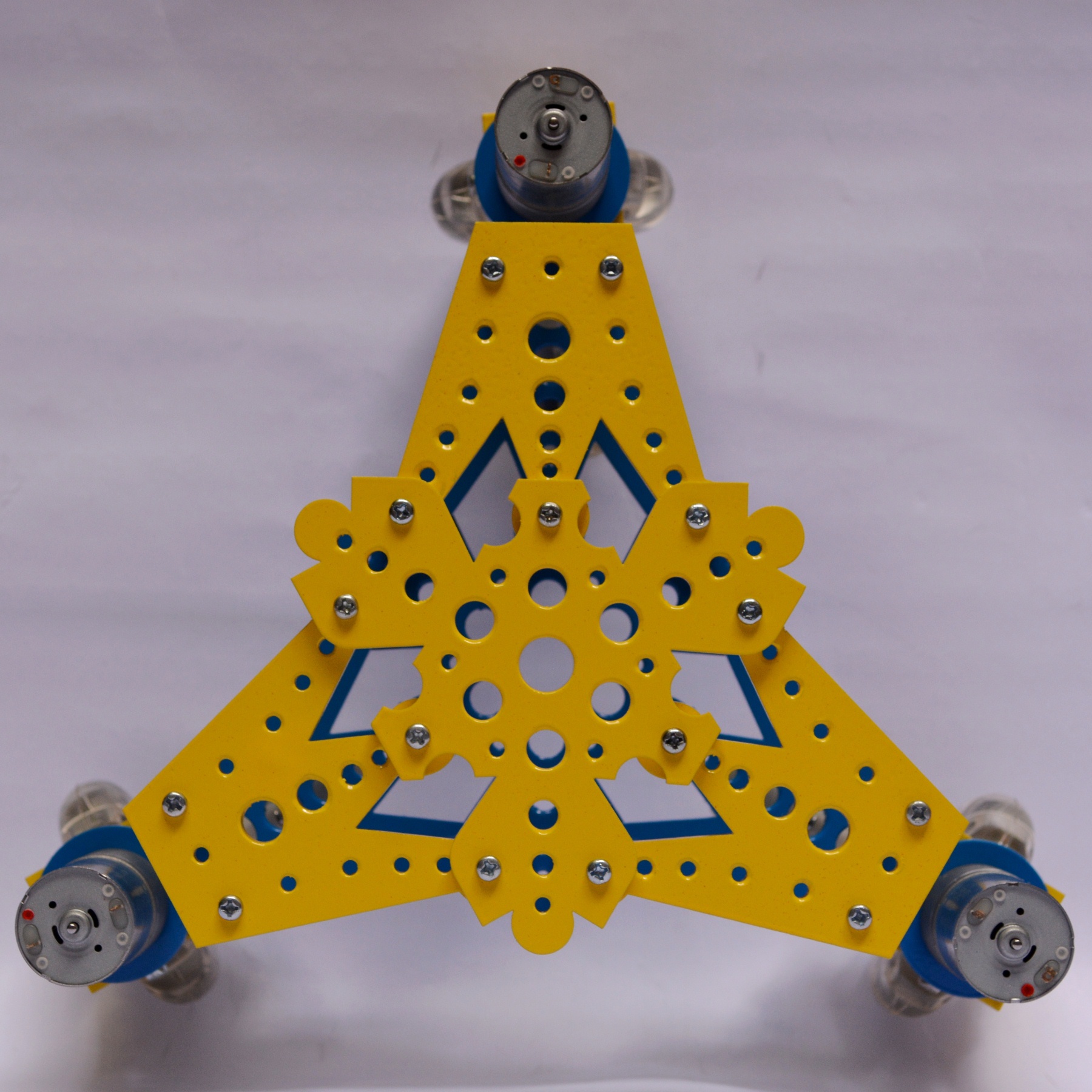
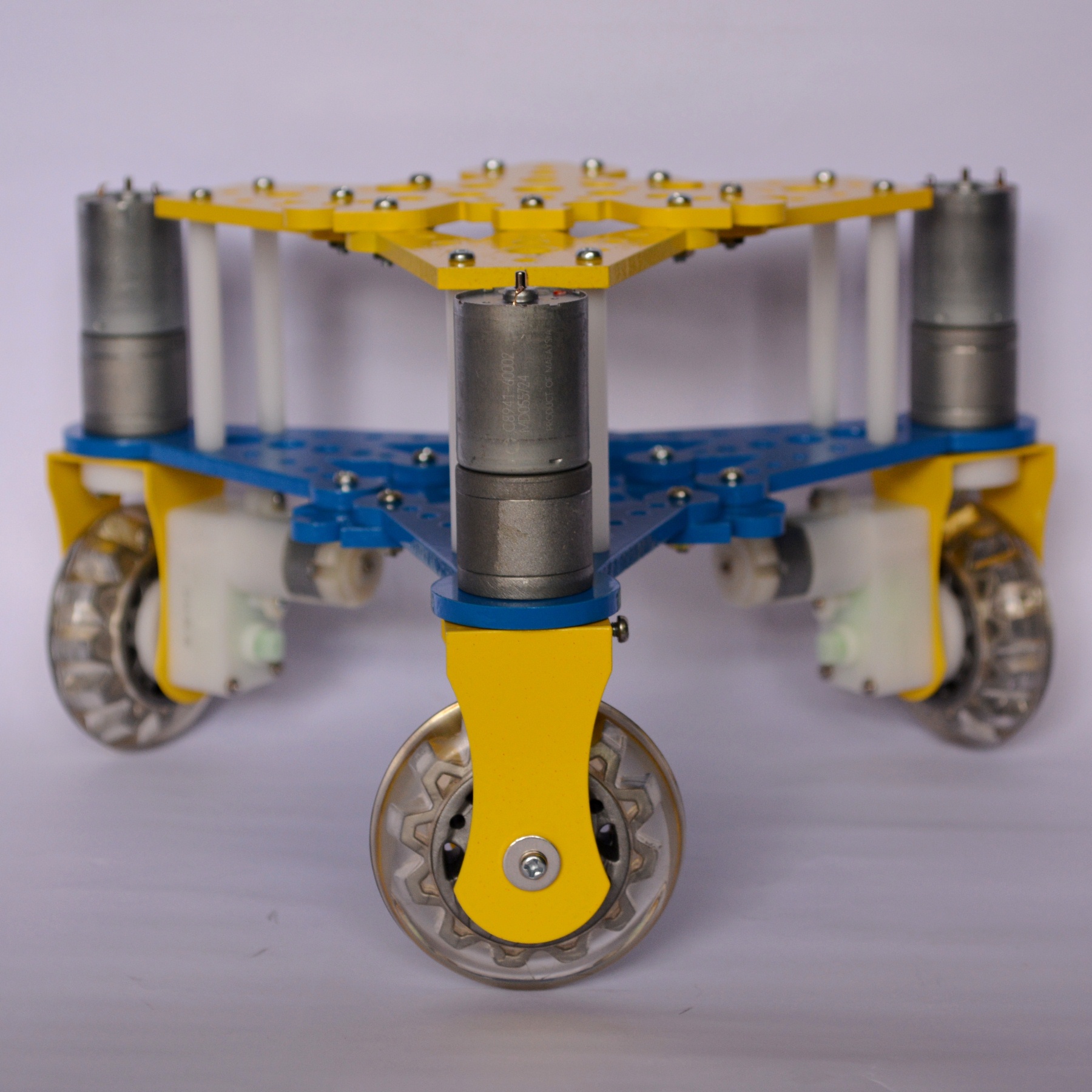
The instantaneous platform is a robot that can moves at any direction similar as omniwheels platform but with synchronized drive castor wheels. It uses the instantaneous center of rotation (ICR) of the chassis to describe this motion which is a well-established method in robotics. The ICR is a mathematical concept which is hardly achieved on a real robot.
The platforms is redundantly actuated mobile robots driven by active conventional wheels with a precise coordination of their actuators in order to guarantee a safe and precise motion without generating high internal forces and slippage.
Colombia - 2021
Hernando Leon-Rodriguez
Michael Felipe Garzon