
Top view of spherical parallel Lightweight-robot
Top view of spherical parallel Lightweight-robot

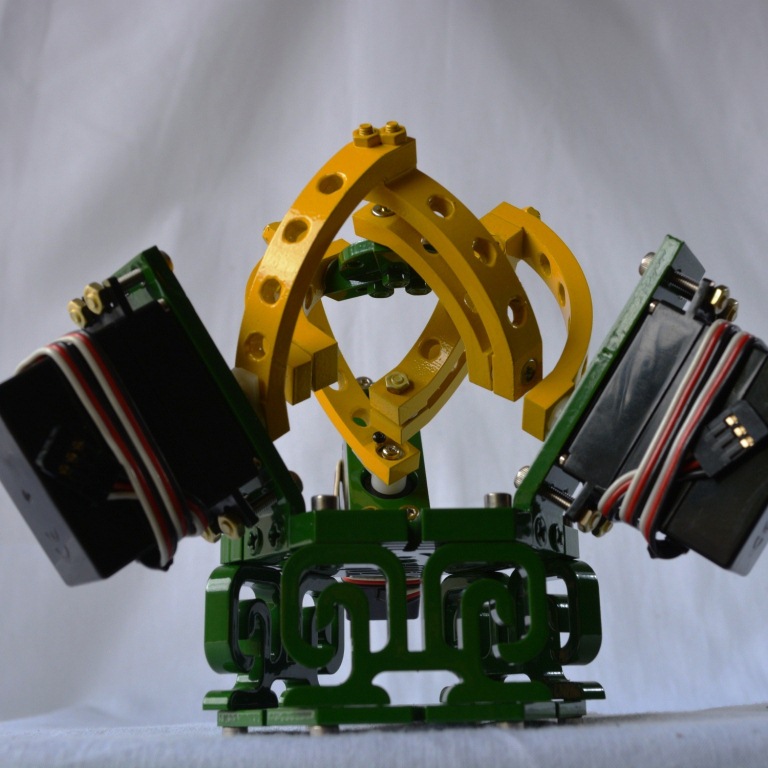
Spherical parallel Lightweight-robot
Size view of spherical parallel Lightweight-robot
This spherical parallel Lightweight-robot is being design with aim of improve the knowledge of robotics teaching. The structure consists of 3 revolute Actuators connected by two link-bars between the platforms.
The base and the top mobile platforms are connected by three equally spaced bars, where all of them repruduce a spherical workspace. The motions of lower links of the mechanism is driven by three servomotors fixed on the base platform.
Colombia - 2017
Hernando Leon-Rodriguez
VR-CAD