Mobile omniwheel-paso robot
Mobile omniwheel-paso robot
Mobile omniwheel-paso robot
Mobile omniwheel-paso robot
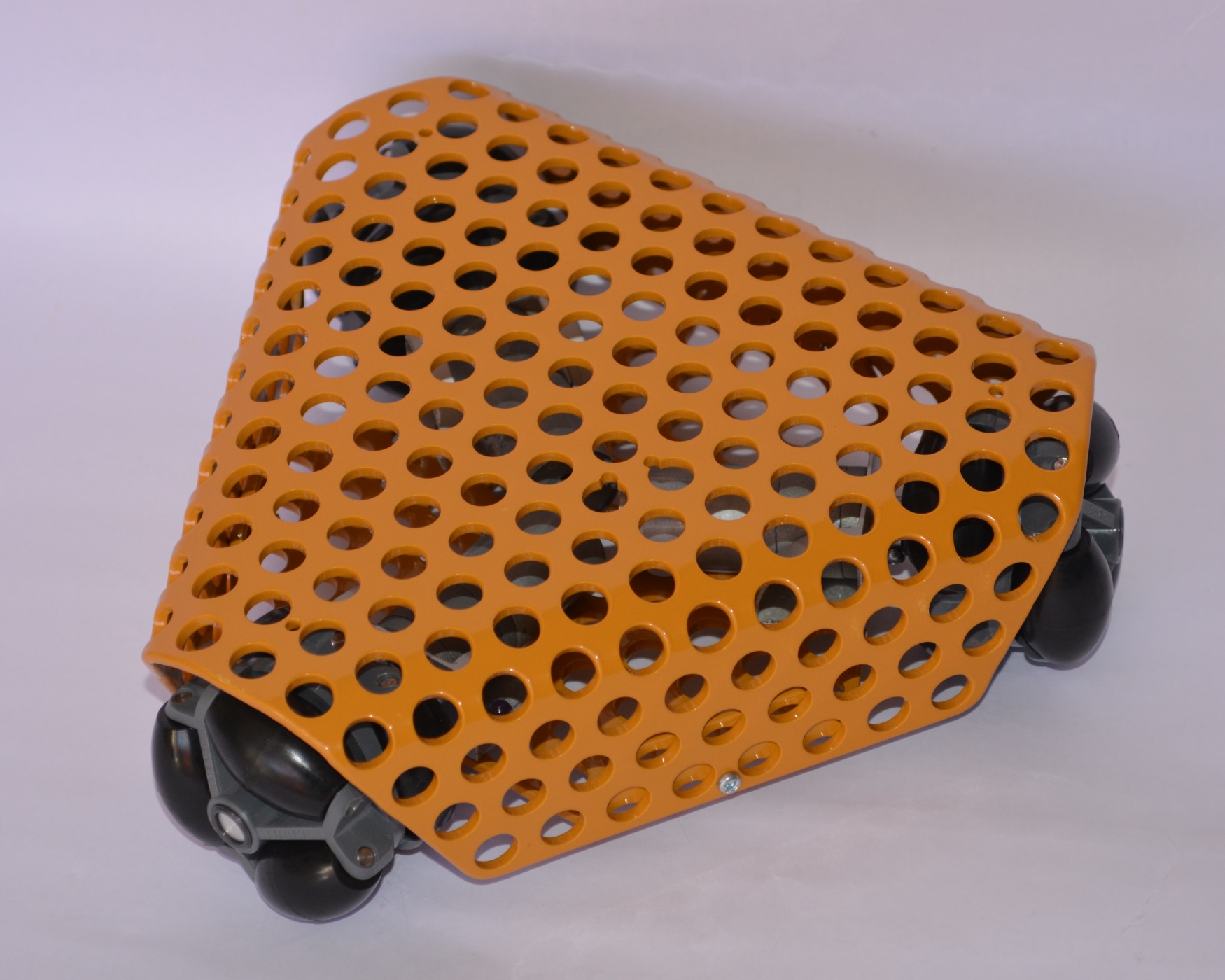
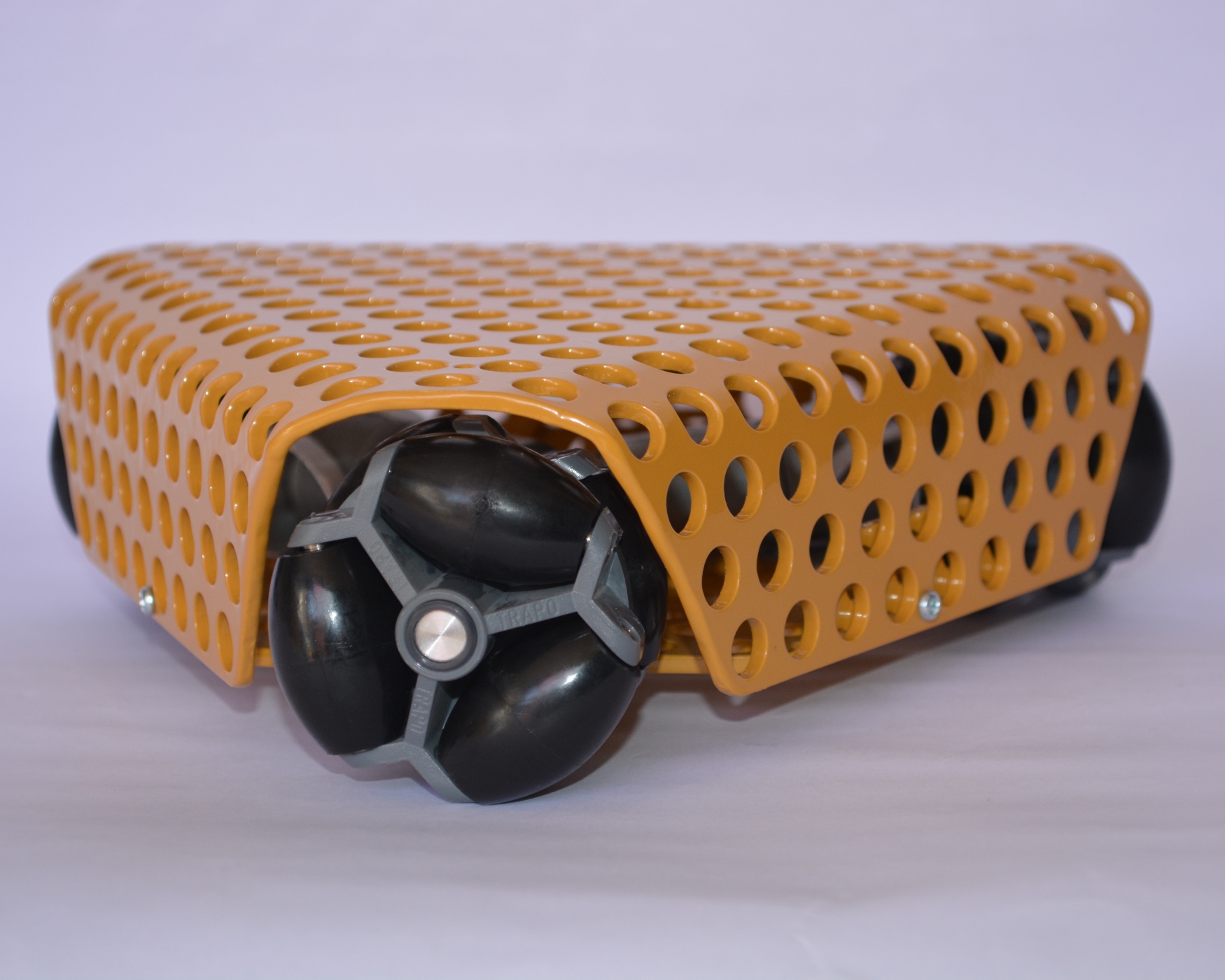
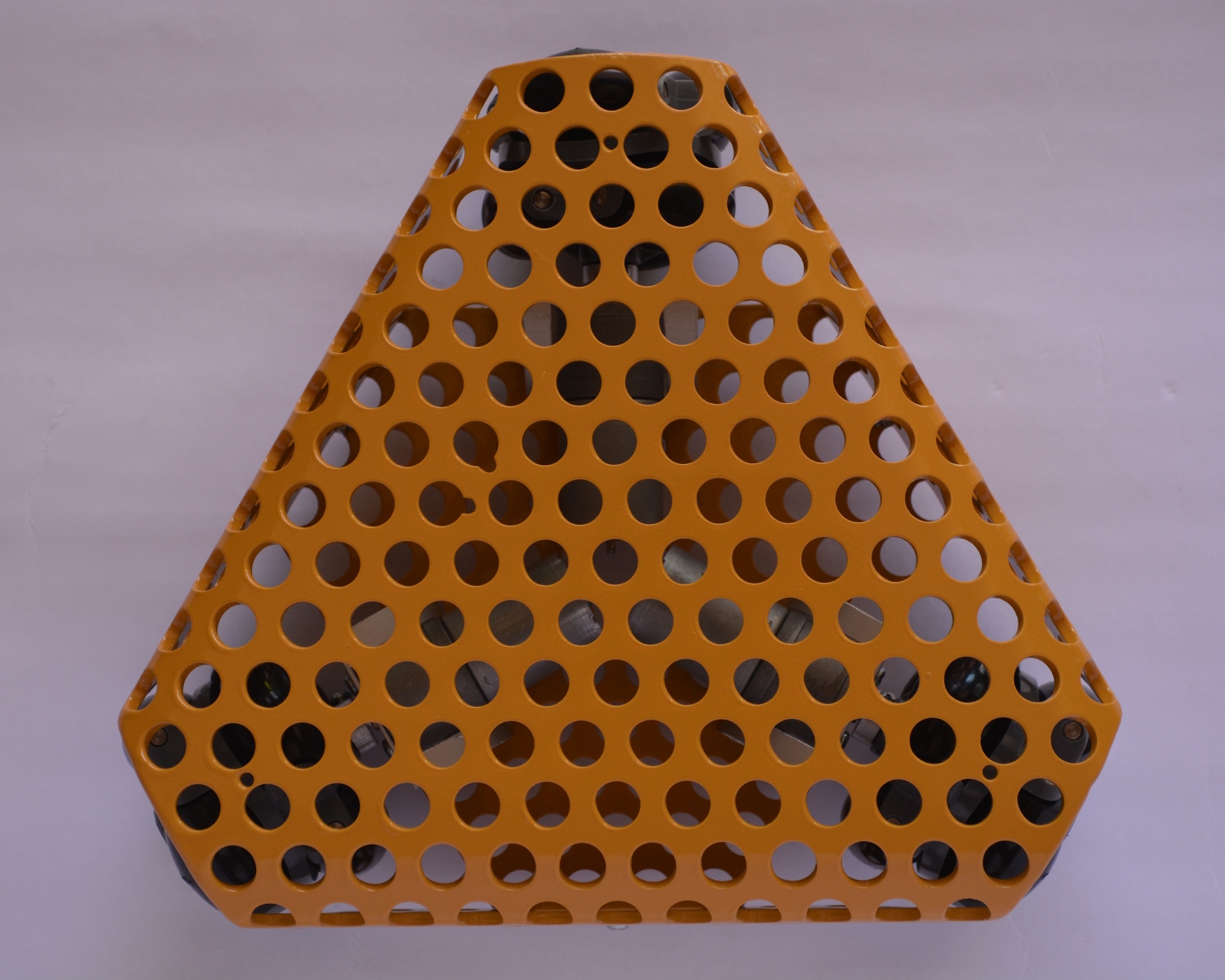
The omniwheel-paso platform is constructed with 3 active omnidirectional wheels powered by stepper motors placed at 120 degrees. More than three wheels provide redundancy and many combinations of motors speeds that can provide the same Euclidean movement. This type of robots has a high possibility of wheel slippery making difficult to obtain an accurate target position.
A holonomic robot means that the number of degrees of freedom (for example 3 parameters of translation in 3D space and 3 parameters of rotation) equal the number of controllable degrees of freedom. However, non-holonomic means the number of controllable degrees of freedom is less than the number of degrees of freedom which the robot experiences.
Colombia - 2020
Hernando Leon-Rodriguez